 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtending Policy from One-Shot Learning through Coaching
Paper and Code
May 13, 2019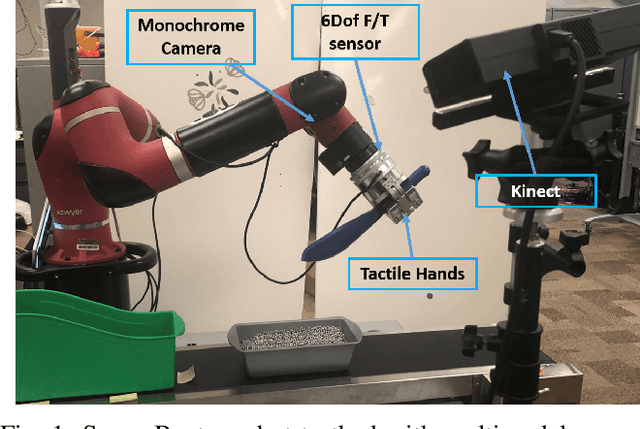
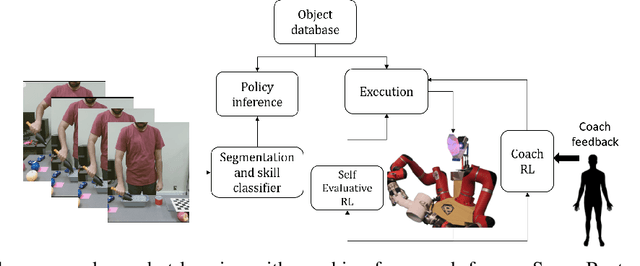
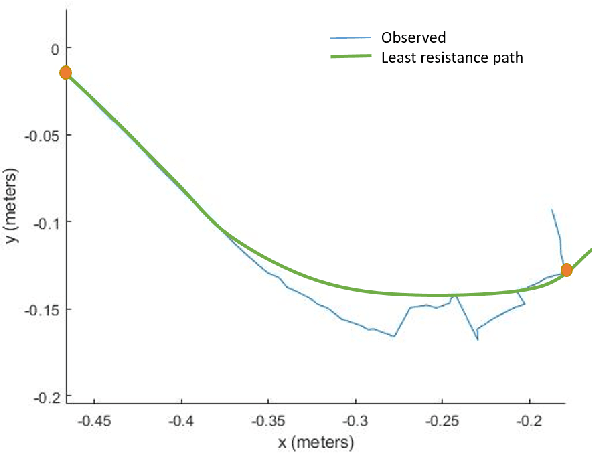
Humans generally teach their fellow collaborators to perform tasks through a small number of demonstrations. The learnt task is corrected or extended to meet specific task goals by means of coaching. Adopting a similar framework for teaching robots through demonstrations and coaching makes teaching tasks highly intuitive. Unlike traditional Learning from Demonstration (LfD) approaches which require multiple demonstrations, we present a one-shot learning from demonstration approach to learn tasks. The learnt task is corrected and generalized using two layers of evaluation/modification. First, the robot self-evaluates its performance and corrects the performance to be closer to the demonstrated task. Then, coaching is used as a means to extend the policy learnt to be adaptable to varying task goals. Both the self-evaluation and coaching are implemented using reinforcement learning (RL) methods. Coaching is achieved through human feedback on desired goal and action modification to generalize to specified task goals. The proposed approach is evaluated with a scooping task, by presenting a single demonstration. The self-evaluation framework aims to reduce the resistance to scooping in the media. To reduce the search space for RL, we bootstrap the search using least resistance path obtained using resistive force theory. Coaching is used to generalize the learnt task policy to transfer the desired quantity of material. Thus, the proposed method provides a framework for learning tasks from one demonstration and generalizing it using human feedback through coaching.