 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExPoSe: Combining State-Based Exploration with Gradient-Based Online Search
Paper and Code
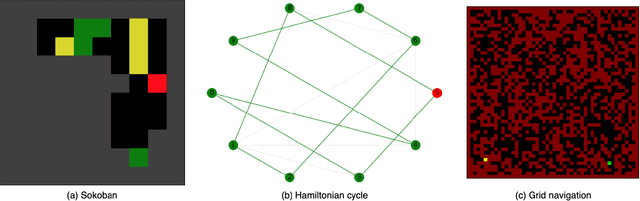
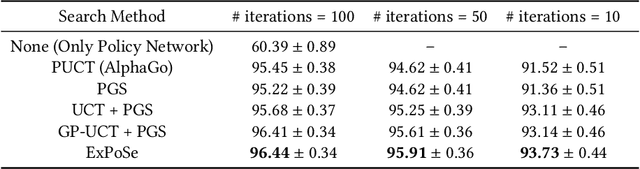
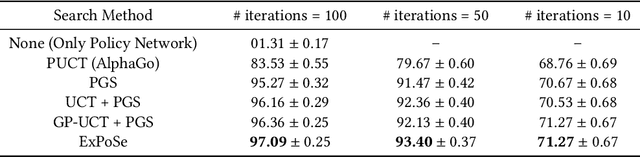
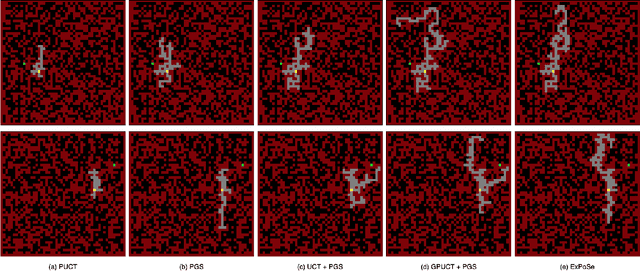
A tree-based online search algorithm iteratively simulates trajectories and updates Q-value information on a set of states represented by a tree structure. Alternatively, policy gradient based online search algorithms update the information obtained from simulated trajectories directly onto the parameters of the policy and has been found to be effective. While tree-based methods limit the updates from simulations to the states that exist in the tree and do not interpolate the information to nearby states, policy gradient search methods do not do explicit exploration. In this paper, we show that it is possible to combine and leverage the strengths of these two methods for improved search performance. We examine the key reasons behind the improvement and propose a simple yet effective online search method, named Exploratory Policy Gradient Search (ExPoSe), that updates both the parameters of the policy as well as search information on the states in the trajectory. We conduct experiments on complex planning problems, which include Sokoban and Hamiltonian cycle search in sparse graphs and show that combining exploration with policy gradient improves online search performance.