 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring and Learning Structure: Active Inference Approach in Navigational Agents
Paper and Code
Aug 12, 2024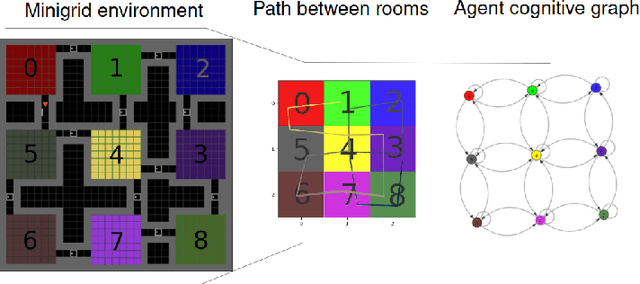
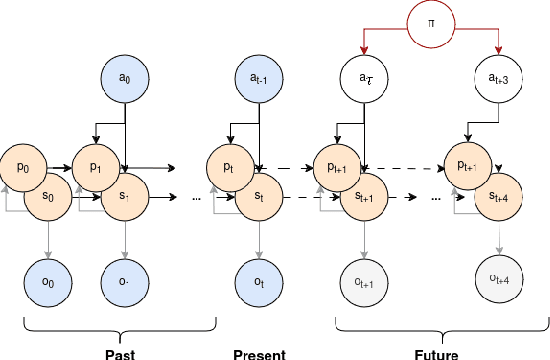
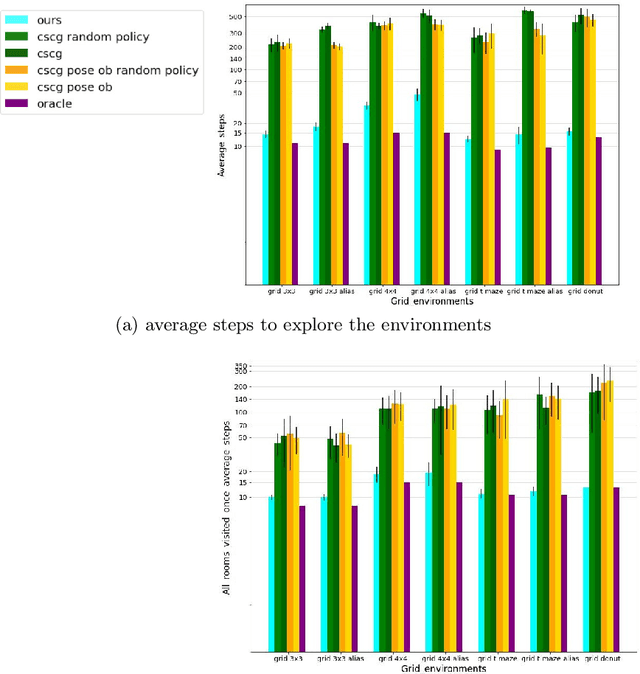

Drawing inspiration from animal navigation strategies, we introduce a novel computational model for navigation and mapping, rooted in biologically inspired principles. Animals exhibit remarkable navigation abilities by efficiently using memory, imagination, and strategic decision-making to navigate complex and aliased environments. Building on these insights, we integrate traditional cognitive mapping approaches with an Active Inference Framework (AIF) to learn an environment structure in a few steps. Through the incorporation of topological mapping for long-term memory and AIF for navigation planning and structure learning, our model can dynamically apprehend environmental structures and expand its internal map with predicted beliefs during exploration. Comparative experiments with the Clone-Structured Graph (CSCG) model highlight our model's ability to rapidly learn environmental structures in a single episode, with minimal navigation overlap. this is achieved without prior knowledge of the dimensions of the environment or the type of observations, showcasing its robustness and effectiveness in navigating ambiguous environments.