Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploration in Action Space
Paper and Code
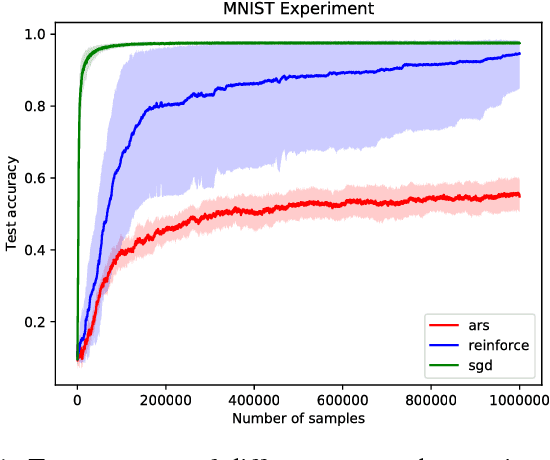

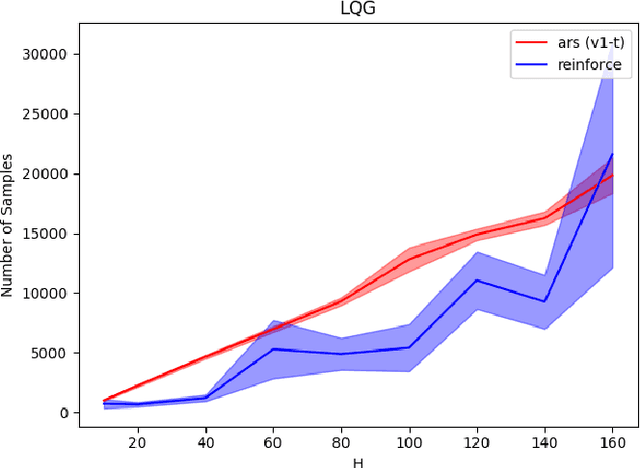
Parameter space exploration methods with black-box optimization have recently been shown to outperform state-of-the-art approaches in continuous control reinforcement learning domains. In this paper, we examine reasons why these methods work better and the situations in which they are worse than traditional action space exploration methods. Through a simple theoretical analysis, we show that when the parametric complexity required to solve the reinforcement learning problem is greater than the product of action space dimensionality and horizon length, exploration in action space is preferred. This is also shown empirically by comparing simple exploration methods on several toy problems.
* Presented at RSS 2018 in Learning and Inference in Robotics:
Integrating Structure, Priors and Models workshop. arXiv admin note: text
overlap with arXiv:1901.11503
View paper on