 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Scene-specific Features for Object Goal Navigation
Paper and Code
Aug 21, 2020
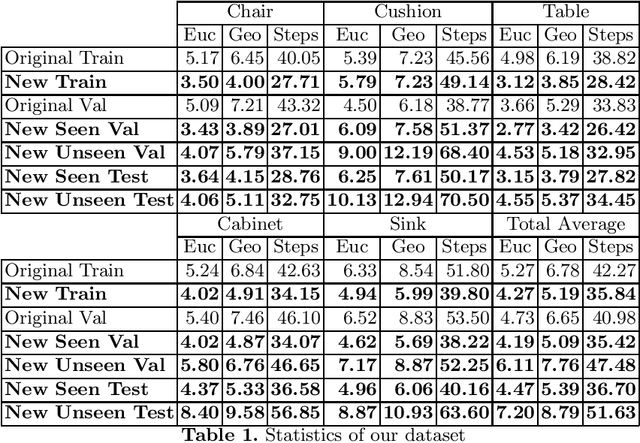
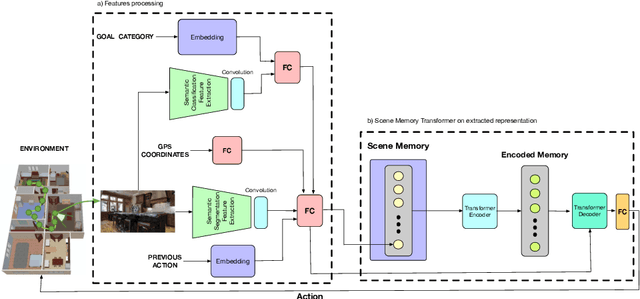
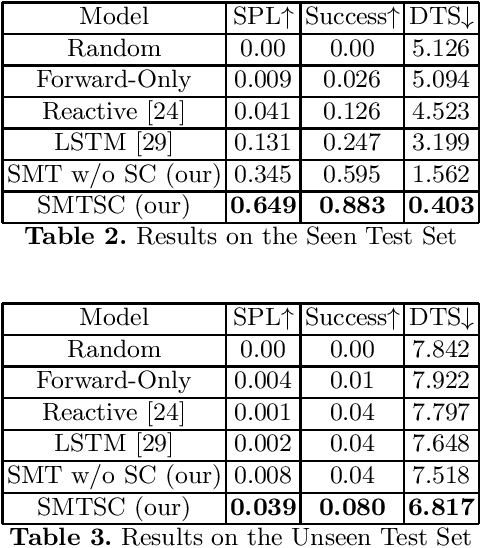
Can the intrinsic relation between an object and the room in which it is usually located help agents in the Visual Navigation Task? We study this question in the context of Object Navigation, a problem in which an agent has to reach an object of a specific class while moving in a complex domestic environment. In this paper, we introduce a new reduced dataset that speeds up the training of navigation models, a notoriously complex task. Our proposed dataset permits the training of models that do not exploit online-built maps in reasonable times even without the use of huge computational resources. Therefore, this reduced dataset guarantees a significant benchmark and it can be used to identify promising models that could be then tried on bigger and more challenging datasets. Subsequently, we propose the SMTSC model, an attention-based model capable of exploiting the correlation between scenes and objects contained in them, highlighting quantitatively how the idea is correct.