 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining Conditions for Reinforcement Learning Behaviors from Real and Imagined Data
Paper and Code
Nov 17, 2020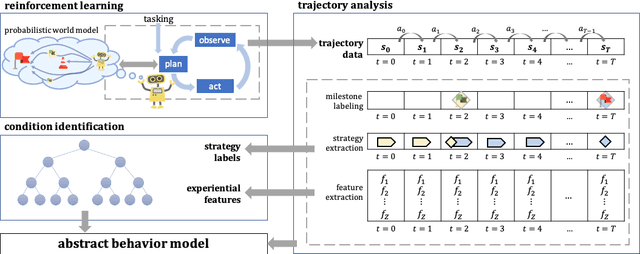

The deployment of reinforcement learning (RL) in the real world comes with challenges in calibrating user trust and expectations. As a step toward developing RL systems that are able to communicate their competencies, we present a method of generating human-interpretable abstract behavior models that identify the experiential conditions leading to different task execution strategies and outcomes. Our approach consists of extracting experiential features from state representations, abstracting strategy descriptors from trajectories, and training an interpretable decision tree that identifies the conditions most predictive of different RL behaviors. We demonstrate our method on trajectory data generated from interactions with the environment and on imagined trajectory data that comes from a trained probabilistic world model in a model-based RL setting.