 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpert Level control of Ramp Metering based on Multi-task Deep Reinforcement Learning
Paper and Code
Jan 30, 2017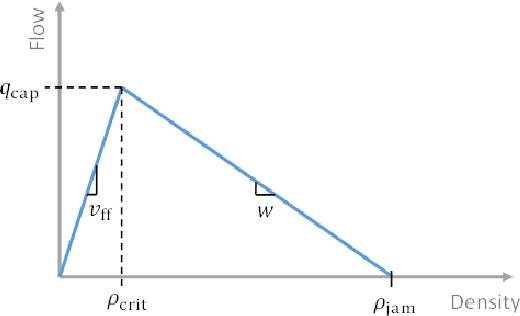
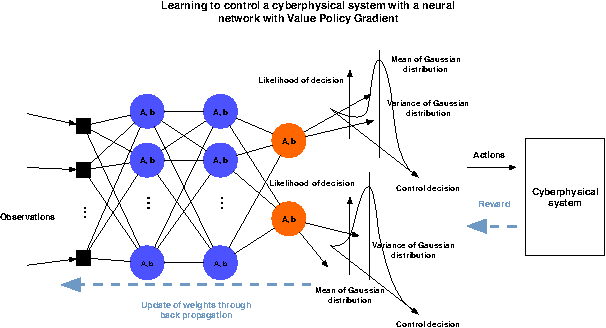
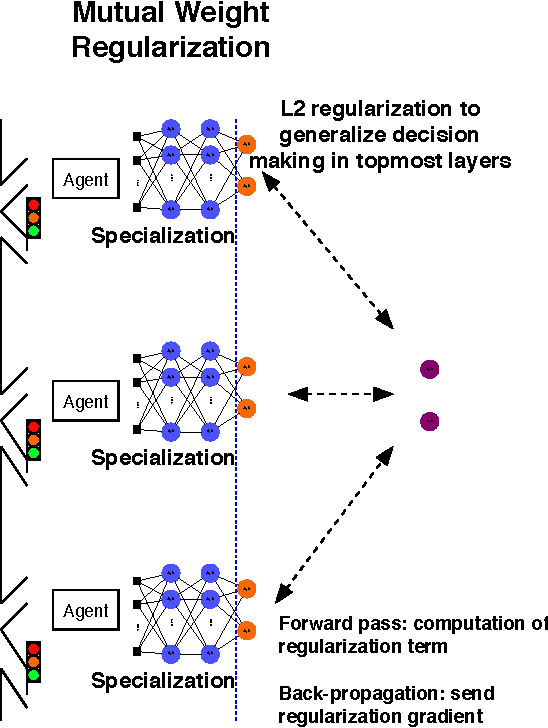
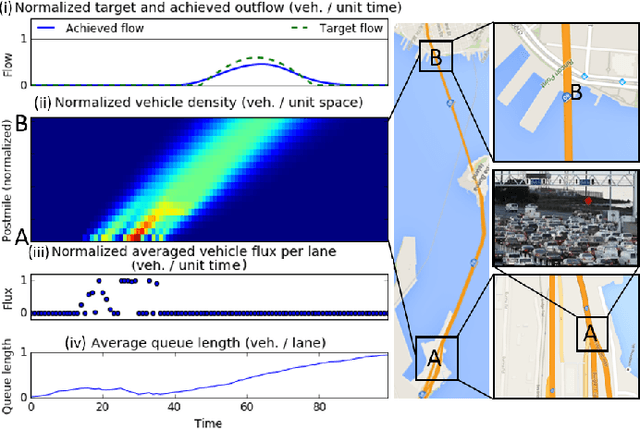
This article shows how the recent breakthroughs in Reinforcement Learning (RL) that have enabled robots to learn to play arcade video games, walk or assemble colored bricks, can be used to perform other tasks that are currently at the core of engineering cyberphysical systems. We present the first use of RL for the control of systems modeled by discretized non-linear Partial Differential Equations (PDEs) and devise a novel algorithm to use non-parametric control techniques for large multi-agent systems. We show how neural network based RL enables the control of discretized PDEs whose parameters are unknown, random, and time-varying. We introduce an algorithm of Mutual Weight Regularization (MWR) which alleviates the curse of dimensionality of multi-agent control schemes by sharing experience between agents while giving each agent the opportunity to specialize its action policy so as to tailor it to the local parameters of the part of the system it is located in.