 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperiments with Tractable Feedback in Robotic Planning under Uncertainty: Insights over a wide range of noise regimes
Paper and Code
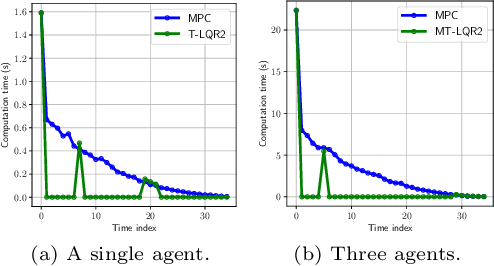
We consider the problem of robotic planning under uncertainty. This problem may be posed as a stochastic optimal control problem, complete solution to which is fundamentally intractable owing to the infamous curse of dimensionality. We report the results of an extensive simulation study in which we have compared two methods, both of which aim to salvage tractability by using alternative, albeit inexact, means for treating feedback. The first is a recently proposed method based on a near-optimal "decoupling principle" for tractable feedback design, wherein a nominal open-loop problem is solved, followed by a linear feedback design around the open-loop. The second is Model Predictive Control (MPC), a widely-employed method that uses repeated re-computation of the nominal open-loop problem during execution to correct for noise, though when interpreted as feedback, this can only said to be an implicit form. We examine a much wider range of noise levels than have been previously reported and empirical evidence suggests that the decoupling method allows for tractable planning over a wide range of uncertainty conditions without unduly sacrificing performance.