 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpanding Versatility of Agile Locomotion through Policy Transitions Using Latent State Representation
Paper and Code
Jun 14, 2023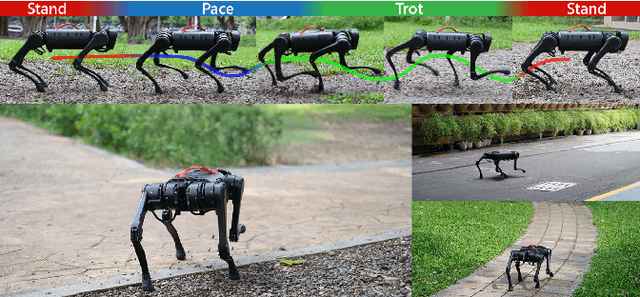
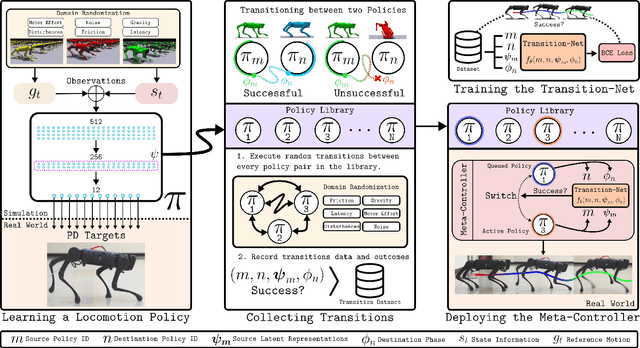
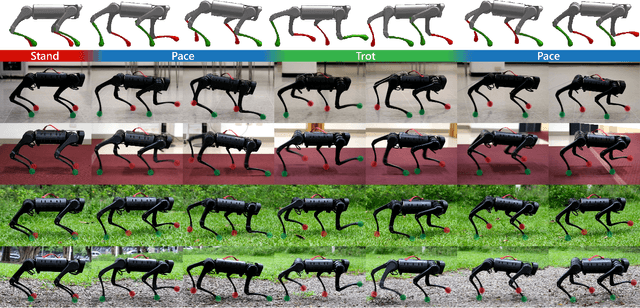
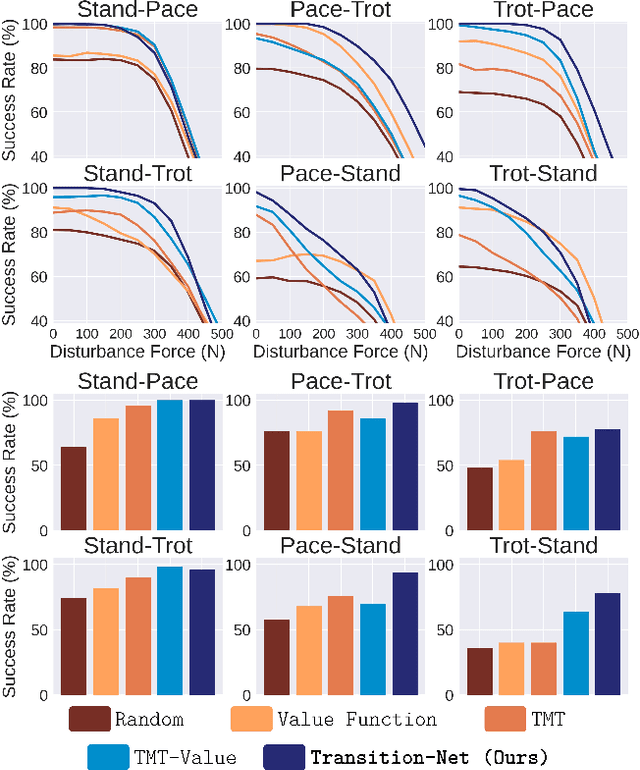
This paper proposes the transition-net, a robust transition strategy that expands the versatility of robot locomotion in the real-world setting. To this end, we start by distributing the complexity of different gaits into dedicated locomotion policies applicable to real-world robots. Next, we expand the versatility of the robot by unifying the policies with robust transitions into a single coherent meta-controller by examining the latent state representations. Our approach enables the robot to iteratively expand its skill repertoire and robustly transition between any policy pair in a library. In our framework, adding new skills does not introduce any process that alters the previously learned skills. Moreover, training of a locomotion policy takes less than an hour with a single consumer GPU. Our approach is effective in the real-world and achieves a 19% higher average success rate for the most challenging transition pairs in our experiments compared to existing approaches.