 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExamining Audio Communication Mechanisms for Supervising Fleets of Agricultural Robots
Paper and Code
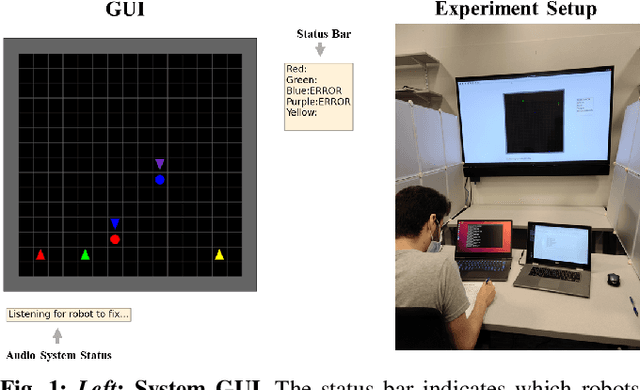
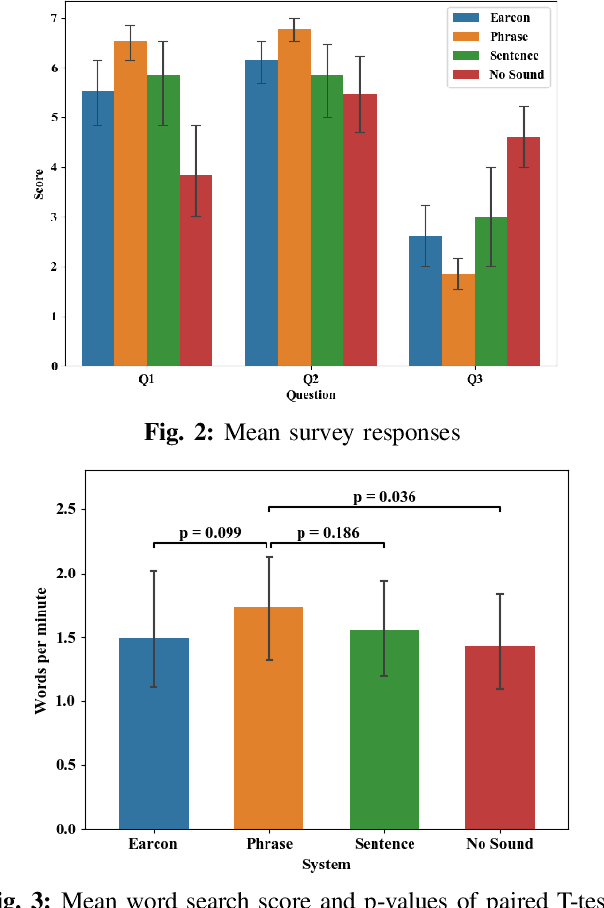
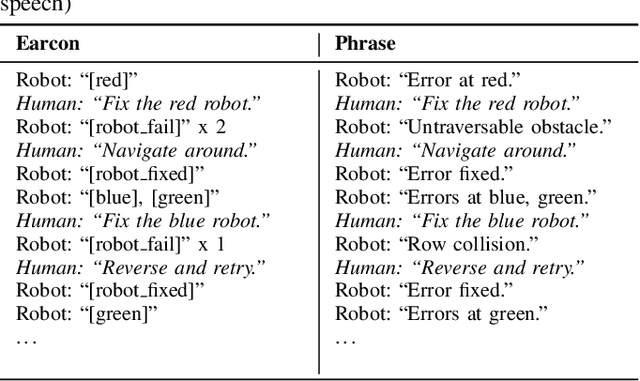
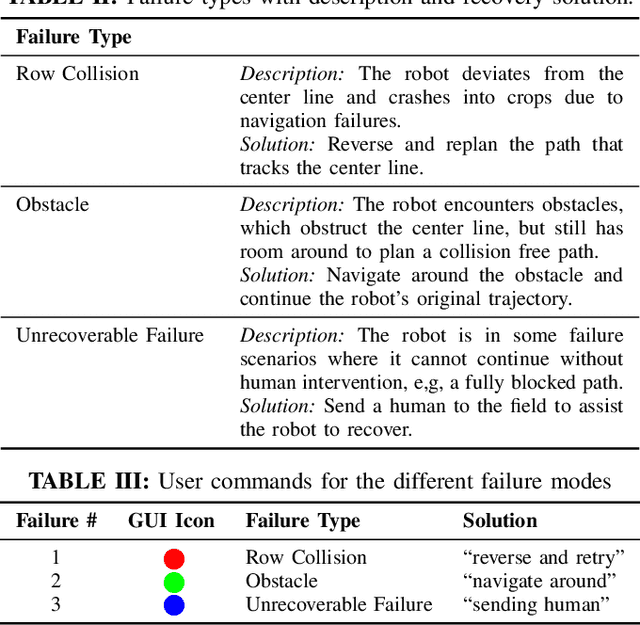
Agriculture is facing a labor crisis, leading to increased interest in fleets of small, under-canopy robots (agbots) that can perform precise, targeted actions (e.g., crop scouting, weeding, fertilization), while being supervised by human operators remotely. However, farmers are not necessarily experts in robotics technology and will not adopt technologies that add to their workload or do not provide an immediate payoff. In this work, we explore methods for communication between a remote human operator and multiple agbots and examine the impact of audio communication on the operator's preferences and productivity. We develop a simulation platform where agbots are deployed across a field, randomly encounter failures, and call for help from the operator. As the agbots report errors, various audio communication mechanisms are tested to convey which robot failed and what type of failure occurs. The human is tasked with verbally diagnosing the failure while completing a secondary task. A user study was conducted to test three audio communication methods: earcons, single-phrase commands, and full sentence communication. Each participant completed a survey to determine their preferences and each method's overall effectiveness. Our results suggest that the system using single phrases is the most positively perceived by participants and may allow for the human to complete the secondary task more efficiently. The code is available at: https://github.com/akamboj2/Agbot-Sim.