Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExact Camera Location Recovery by Least Unsquared Deviations
Paper and Code
Sep 09, 2018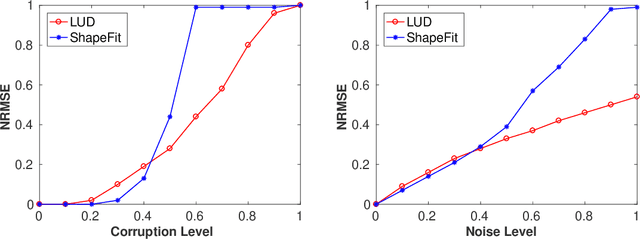


We establish exact recovery for the Least Unsquared Deviations (LUD) algorithm of Ozyesil and Singer. More precisely, we show that for sufficiently many cameras with given corrupted pairwise directions, where both camera locations and pairwise directions are generated by a special probabilistic model, the LUD algorithm exactly recovers the camera locations with high probability. A similar exact recovery guarantee was established for the ShapeFit algorithm by Hand, Lee and Voroninski, but with typically less corruption.
View paper on