 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEWareNet: Emotion Aware Human Intent Prediction and Adaptive Spatial Profile Fusion for Social Robot Navigation
Paper and Code
Dec 01, 2020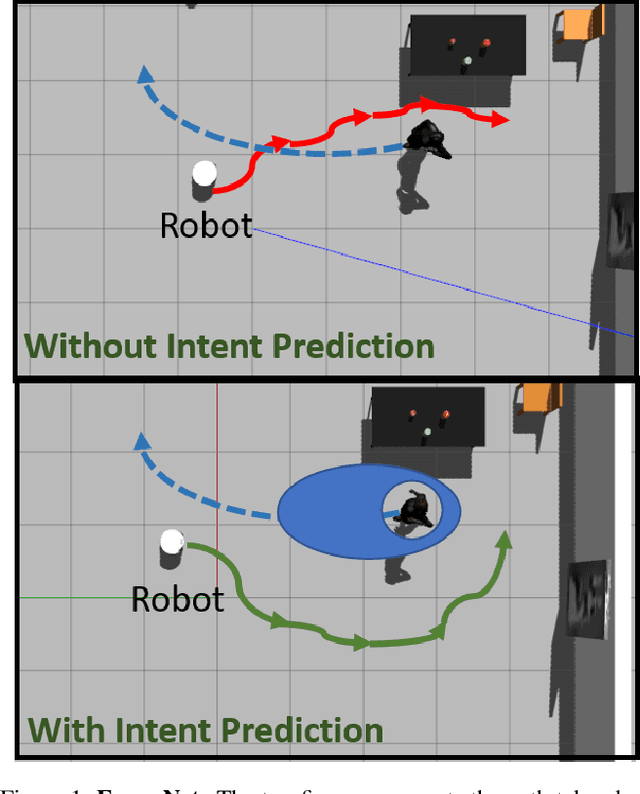
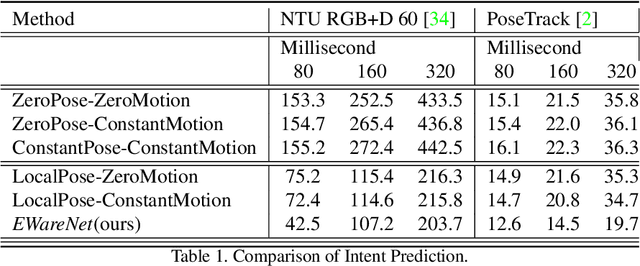
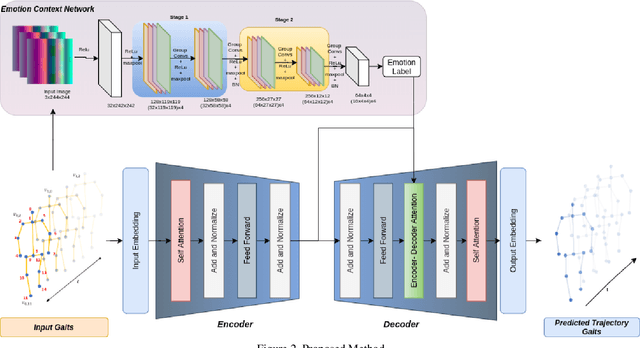
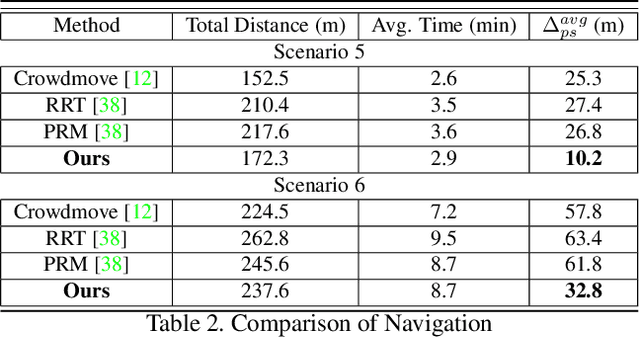
We present EWareNet, a novel intent-aware social robot navigation algorithm among pedestrians. Our approach predicts the trajectory-based pedestrian intent from historical gaits, which is then used for intent-guided navigation taking into account social and proxemic constraints. To predict pedestrian intent, we propose a transformer-based model that works on a commodity RGB-D camera mounted onto a moving robot. Our intent prediction routine is integrated into a mapless navigation scheme and makes no assumptions about the environment of pedestrian motion. Our navigation scheme consists of a novel obstacle profile representation methodology that is dynamically adjusted based on the pedestrian pose, intent, and emotion. The navigation scheme is based on a reinforcement learning algorithm that takes into consideration human intent and robot's impact on human intent, in addition to the environmental configuration. We outperform current state-of-art algorithms for intent prediction from 3D gaits.