 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent Fusion Photometric Stereo Network
Paper and Code
Mar 11, 2023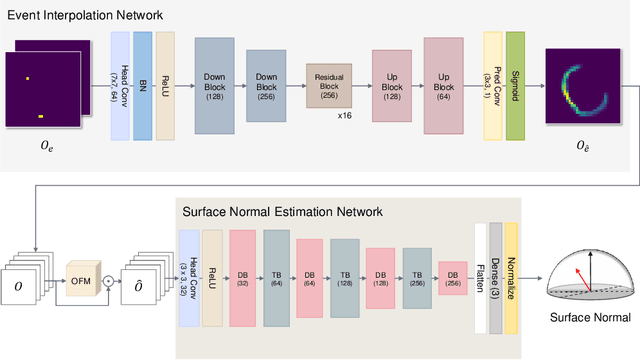
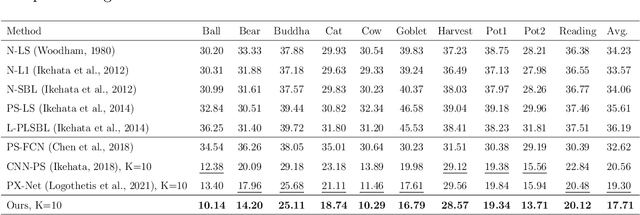
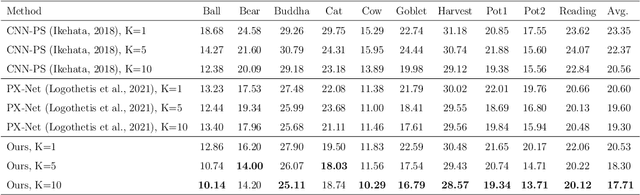
We present a novel method to estimate the surface normal of an object in an ambient light environment using RGB and event cameras. Modern photometric stereo methods rely on an RGB camera, mainly in a dark room, to avoid ambient illumination. To alleviate the limitations of the darkroom environment and to use essential light information, we employ an event camera with a high dynamic range and low latency. This is the first study that uses an event camera for the photometric stereo task, which works on continuous light sources and ambient light environment. In this work, we also curate a novel photometric stereo dataset that is constructed by capturing objects with event and RGB cameras under numerous ambient lights environment. Additionally, we propose a novel framework named Event Fusion Photometric Stereo Network~(EFPS-Net), which estimates the surface normals of an object using both RGB frames and event signals. Our proposed method interpolates event observation maps that generate light information with sparse event signals to acquire fluent light information. Subsequently, the event-interpolated observation maps are fused with the RGB observation maps. Our numerous experiments showed that EFPS-Net outperforms state-of-the-art methods on a dataset captured in the real world where ambient lights exist. Consequently, we demonstrate that incorporating additional modalities with EFPS-Net alleviates the limitations that occurred from ambient illumination.