 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Sampling Methods for Robotic Sediment Sampling Systems
Paper and Code
Jun 23, 2020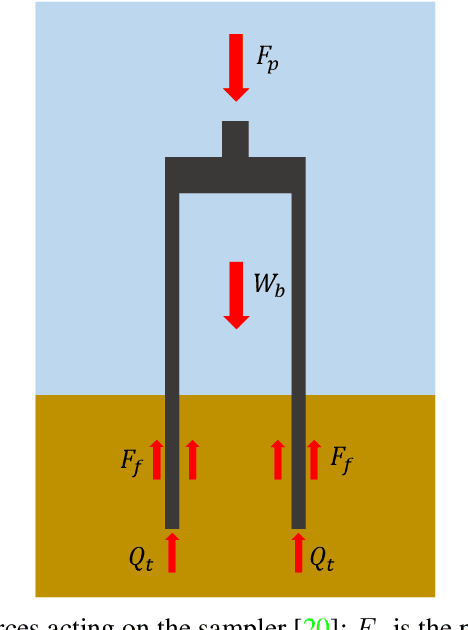
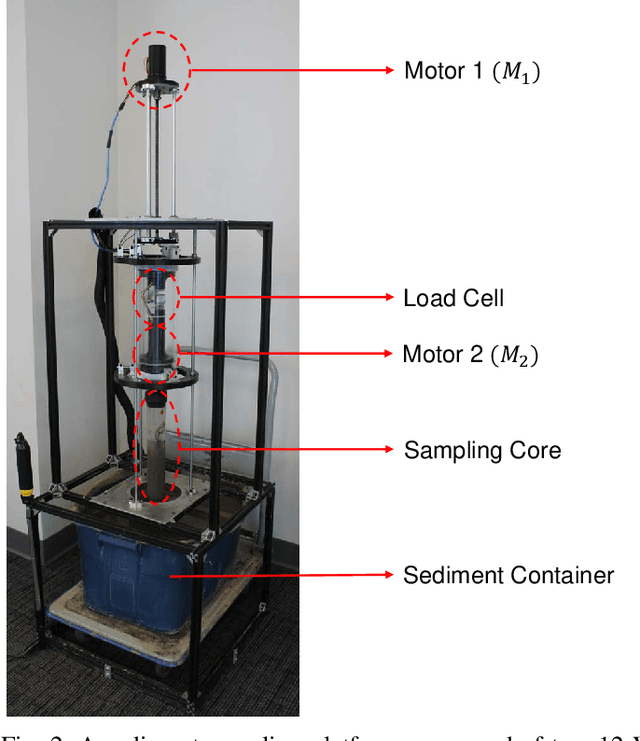
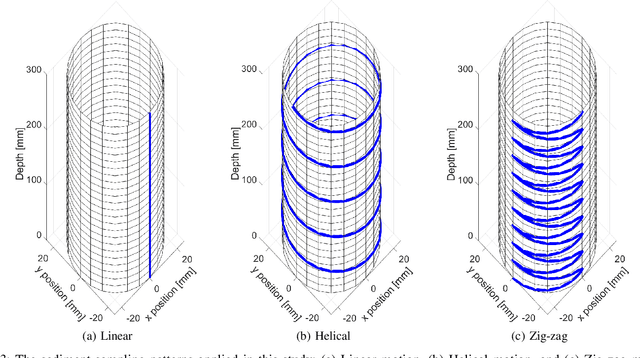
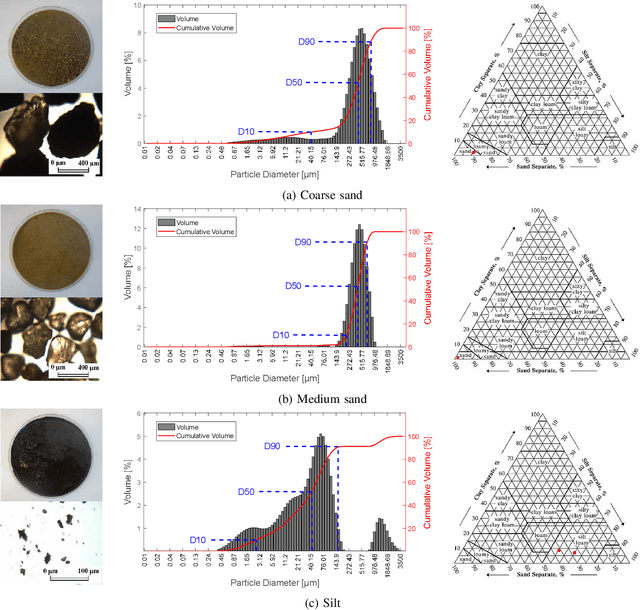
Analysis of sediments from rivers, lakes, reservoirs, wetlands and other constructed surface water impoundments is an important tool to characterize the function and health of these systems, but is generally carried out manually. This is costly and can be hazardous and difficult for humans due to inaccessibility, contamination, or availability of required equipment. Robotic sampling systems can ease these burdens, but little work has examined the efficiency of such sampling means and no prior work has investigated the quality of the resulting samples. This paper presents an experimental study that evaluates and optimizes sediment sampling patterns applied to a robot sediment sampling system that allows collection of minimally-disturbed sediment cores from natural and man-made water bodies for various sediment types. To meet this need, we developed and tested a robotic sampling platform in the laboratory to test functionality under a range of sediment types and operating conditions. Specifically, we focused on three patterns by which a cylindrical coring device was driven into the sediment (linear, helical, and zig-zag) for three sediment types (coarse sand, medium sand, and silt). The results show that the optimal sampling pattern varies depending on the type of sediment and can be optimized based on the sampling objective. We examined two sampling objectives: maximizing the mass of minimally disturbed sediment and minimizing the power per mass of sample. This study provides valuable data to aid in the selection of optimal sediment coring methods for various applications and builds a solid foundation for future field testing under a range of environmental conditions.