 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating a GAN for enhancing camera simulation for robotics
Paper and Code
Sep 14, 2022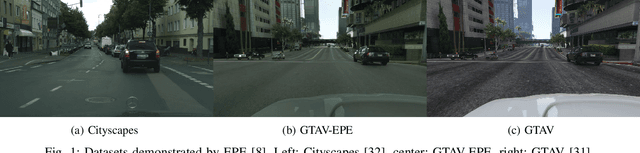
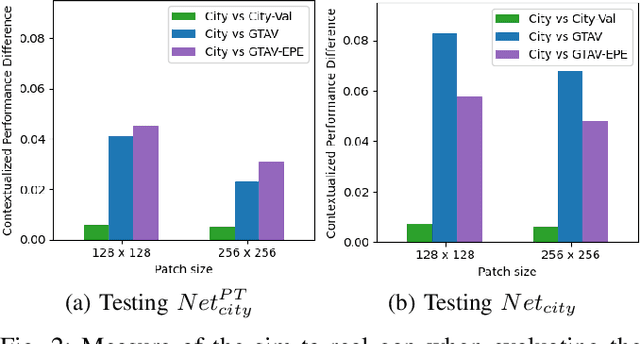
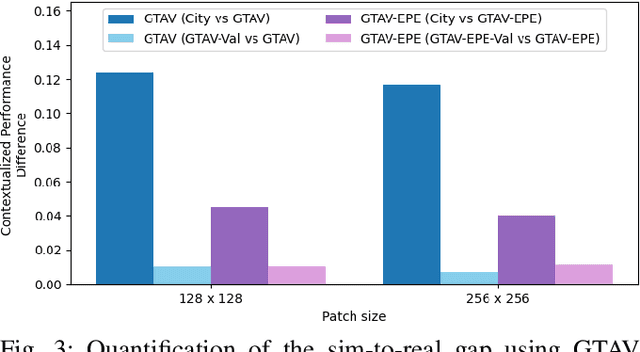
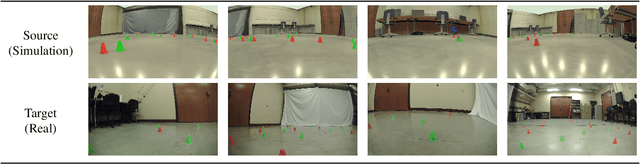
Given the versatility of generative adversarial networks (GANs), we seek to understand the benefits gained from using an existing GAN to enhance simulated images and reduce the sim-to-real gap. We conduct an analysis in the context of simulating robot performance and image-based perception. Specifically, we quantify the GAN's ability to reduce the sim-to-real difference in image perception in robotics. Using semantic segmentation, we analyze the sim-to-real difference in training and testing, using nominal and enhanced simulation of a city environment. As a secondary application, we consider use of the GAN in enhancing an indoor environment. For this application, object detection is used to analyze the enhancement in training and testing. The results presented quantify the reduction in the sim-to-real gap when using the GAN, and illustrate the benefits of its use.