 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVA-Planner: Environmental Adaptive Quadrotor Planning
Paper and Code
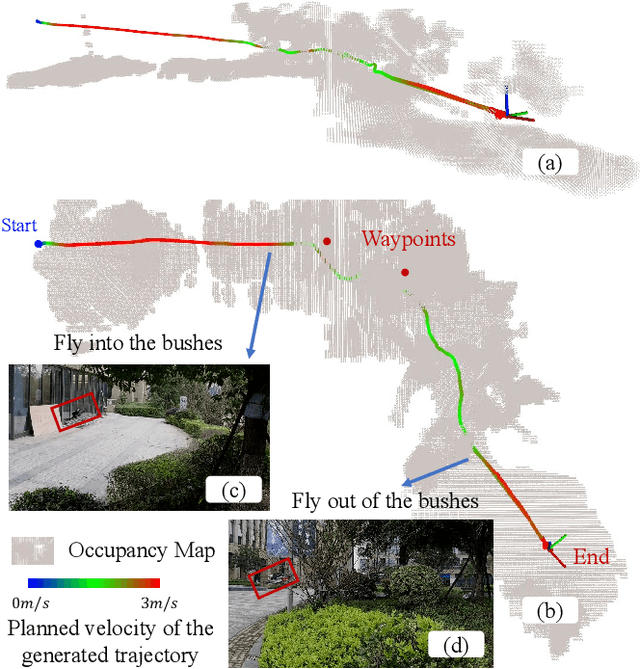
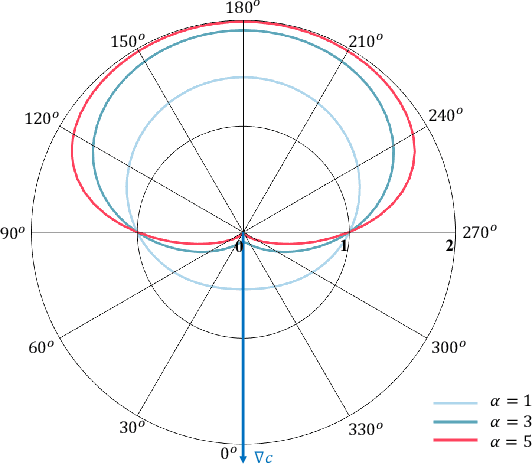
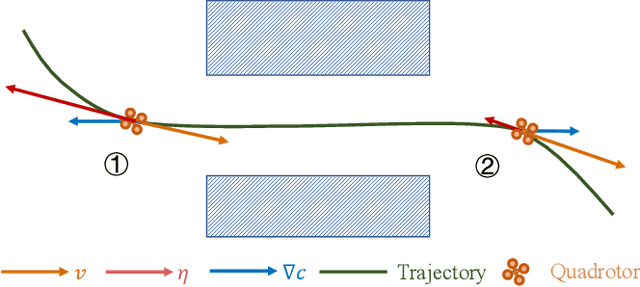
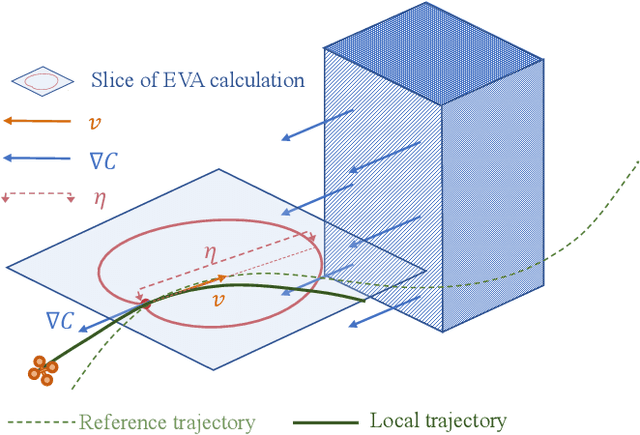
Due to its superior agility and flexibility, quadrotor is popularly used in challenging environments. In these scenarios, trajectory planning plays a vital role in generating safe motions to avoid obstacles while ensuring flight smoothness. Although many works on quadrotor planning have been proposed, a research gap exists in incorporating self-adaptation into a planning framework to enable a drone to automatically fly slower in denser environments and increase its speed in a safer area. In this paper, we propose an environmental adaptive planner that effectively adjusts the flight aggressiveness based on the obstacle distribution and quadrotor state. Firstly, we design an environmental adaptive safety-aware method to assign the priority of obstacles according to the environmental risk level and instantaneous motion tendency. Then, we apply it into a multi-layered model predictive contouring control framework to generate adaptive, safe, and dynamical feasible local trajectories. Extensive simulations and real-world experiments verify our planning framework's efficiency and robustness and show superior performances in the benchmark comparison. Moreover, we will release our planning framework as open-source ros-packages.