 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Magnitude and Phase of Automotive Radar Signals under Multiple Interference Sources with Fully Convolutional Networks
Paper and Code
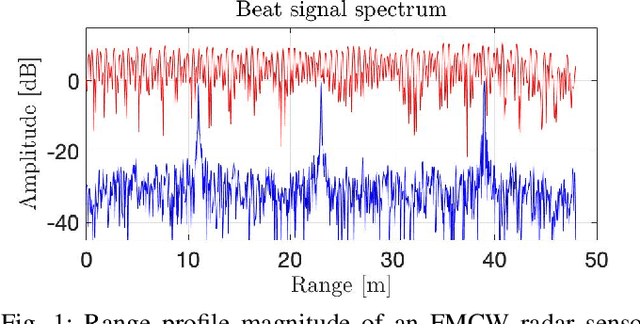
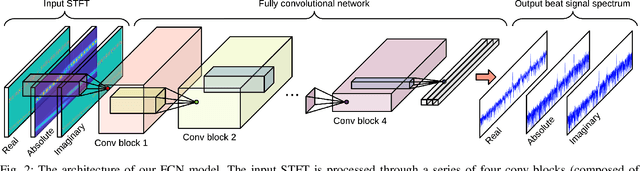
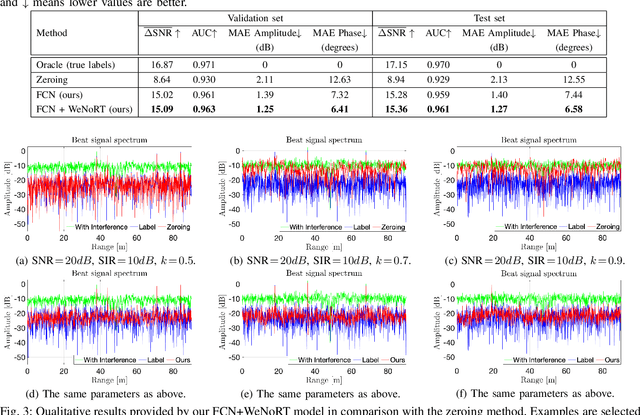
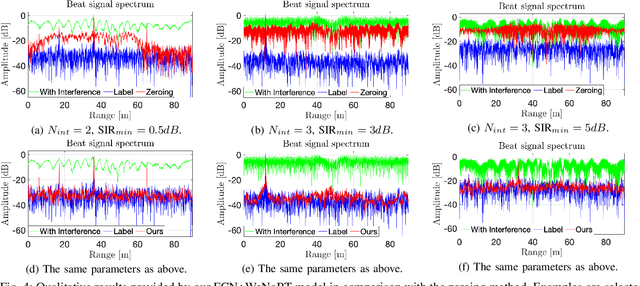
Radar sensors are gradually becoming a wide-spread equipment for road vehicles, playing a crucial role in autonomous driving and road safety. The broad adoption of radar sensors increases the chance of interference among sensors from different vehicles, generating corrupted range profiles and range-Doppler maps. In order to extract distance and velocity of multiple targets from range-Doppler maps, the interference affecting each range profile needs to be mitigated. In this paper, we propose a fully convolutional neural network for automotive radar interference mitigation. In order to train our network in a real-world scenario, we introduce a new data set of realistic automotive radar signals with multiple targets and multiple interferers. To our knowledge, this is the first work to mitigate interference from multiple sources. Furthermore, we introduce a new training regime that eliminates noisy weights, showing superior results compared to the widely-used dropout. While some previous works successfully estimated the magnitude of automotive radar signals, we are the first to propose a deep learning model that can accurately estimate the phase. For instance, our novel approach reduces the phase estimation error with respect to the commonly-adopted zeroing technique by half, from 12.55 degrees to 6.58 degrees. Considering the lack of databases for automotive radar interference mitigation, we release as open source our large-scale data set that closely replicates the real-world automotive scenario for multiple interference cases, allowing others to objectively compare their future work in this domain. Our data set is available for download at: http://github.com/ristea/arim-v2.