 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Linear Dynamical Networks of Cyclostationary Processes
Paper and Code
Sep 26, 2020

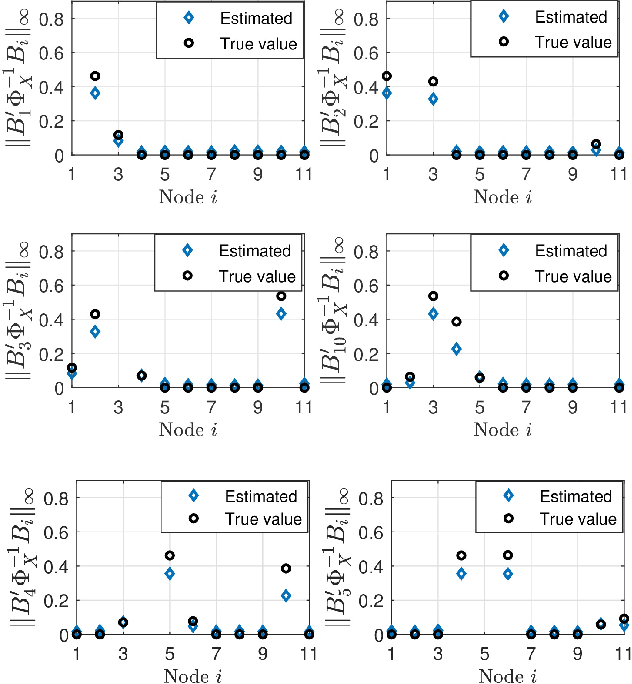
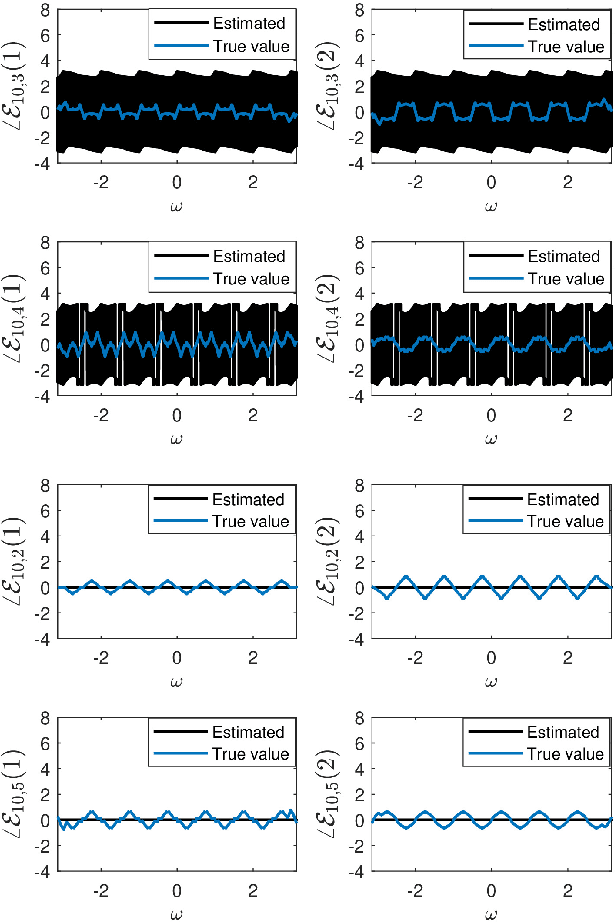
Topology learning is an important problem in dynamical systems with implications to security and optimal control. The majority of prior work in consistent topology estimation relies on dynamical systems excited by temporally uncorrelated processes. In this article, we present a novel algorithm for guaranteed topology learning, in networks that are excited by temporally colored, cyclostationary processes. Furthermore, unlike prior work, the framework applies to linear dynamic system with complex valued dependencies. In the second part of the article, we analyze conditions for consistent topology learning for bidirected radial networks when a subset of the network is unobserved. Here, few agents are unobserved and the full topology along with unobserved nodes are recovered from observed agents data alone. Our theoretical contributions are validated on test networks.