 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeES-ENAS: Combining Evolution Strategies with Neural Architecture Search at No Extra Cost for Reinforcement Learning
Paper and Code
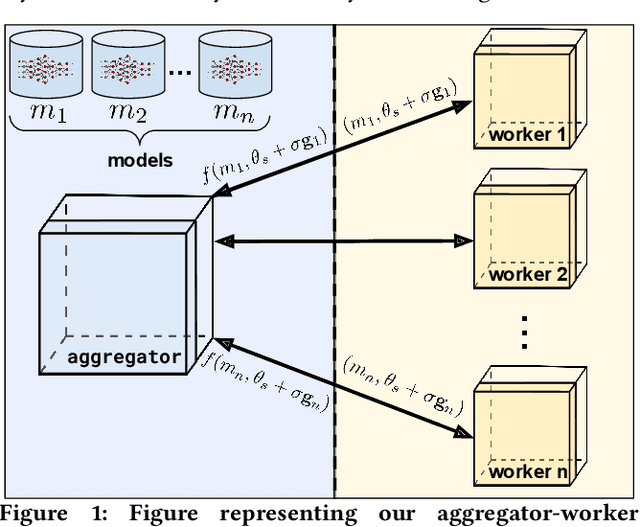
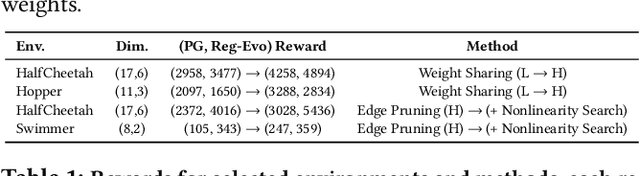
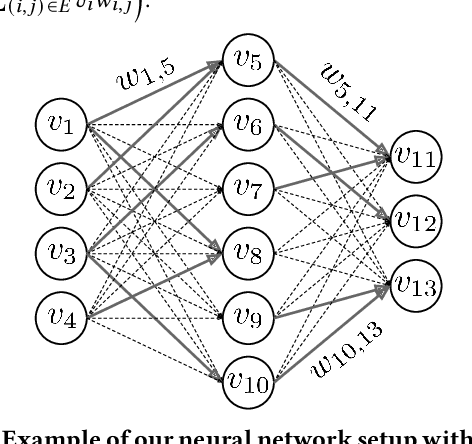
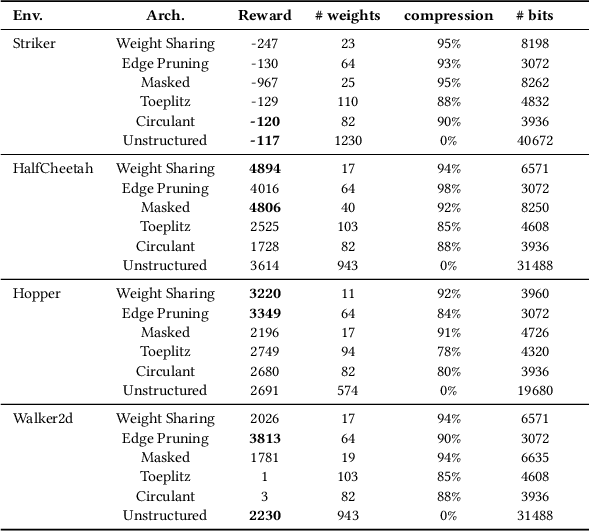
We introduce ES-ENAS, a simple neural architecture search (NAS) algorithm for the purpose of reinforcement learning (RL) policy design, by combining Evolutionary Strategies (ES) and Efficient NAS (ENAS) in a highly scalable and intuitive way. Our main insight is noticing that ES is already a distributed blackbox algorithm, and thus we may simply insert a model controller from ENAS into the central aggregator in ES and obtain weight sharing properties for free. By doing so, we bridge the gap from NAS research in supervised learning settings to the reinforcement learning scenario through this relatively simple marriage between two different lines of research, and are one of the first to apply controller-based NAS techniques to RL. We demonstrate the utility of our method by training combinatorial neural network architectures for RL problems in continuous control, via edge pruning and weight sharing. We also incorporate a wide variety of popular techniques from modern NAS literature, including multiobjective optimization and varying controller methods, to showcase their promise in the RL field and discuss possible extensions. We achieve >90% network compression for multiple tasks, which may be special interest in mobile robotics with limited storage and computational resources.