 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeErgodic Coverage In Constrained Environments Using Stochastic Trajectory Optimization
Paper and Code
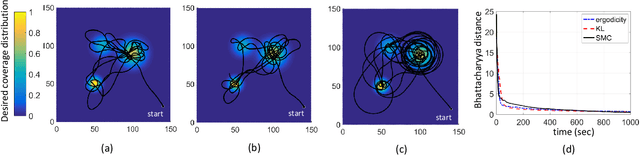
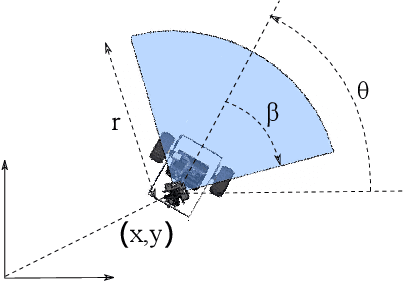
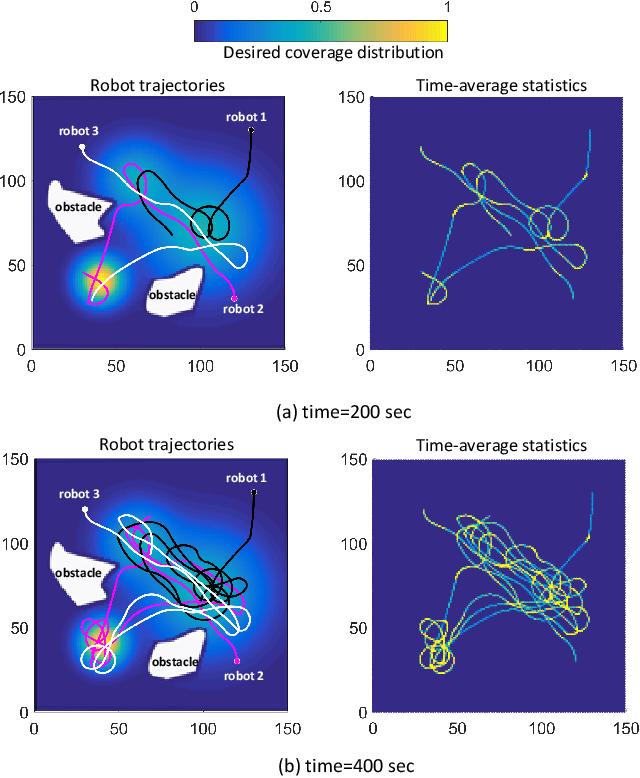
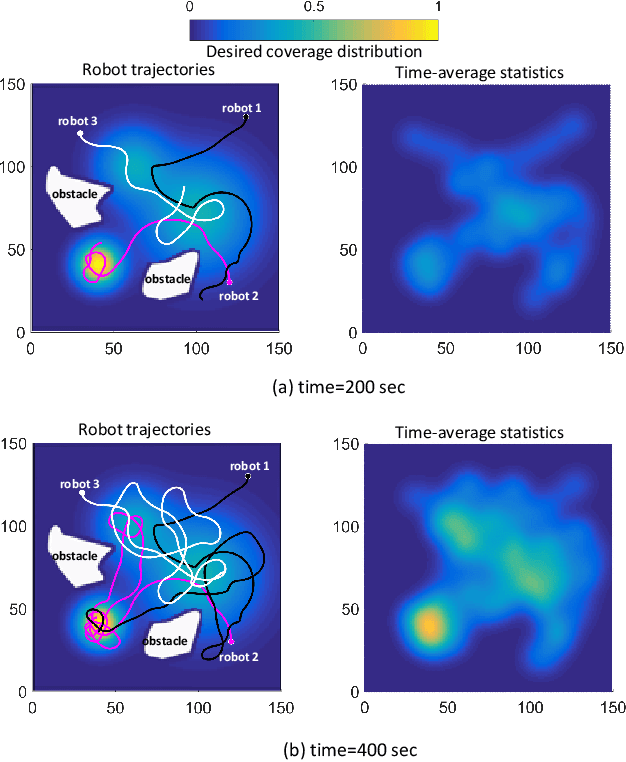
In search and surveillance applications in robotics, it is intuitive to spatially distribute robot trajectories with respect to the probability of locating targets in the domain. Ergodic coverage is one such approach to trajectory planning in which a robot is directed such that the percentage of time spent in a region is in proportion to the probability of locating targets in that region. In this work, we extend the ergodic coverage algorithm to robots operating in constrained environments and present a formulation that can capture sensor footprint and avoid obstacles and restricted areas in the domain. We demonstrate that our formulation easily extends to coordination of multiple robots equipped with different sensing capabilities to perform ergodic coverage of a domain.