 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-Based $Sim$ Calibration of 2D Lidars to Egomotion Sensors
Paper and Code
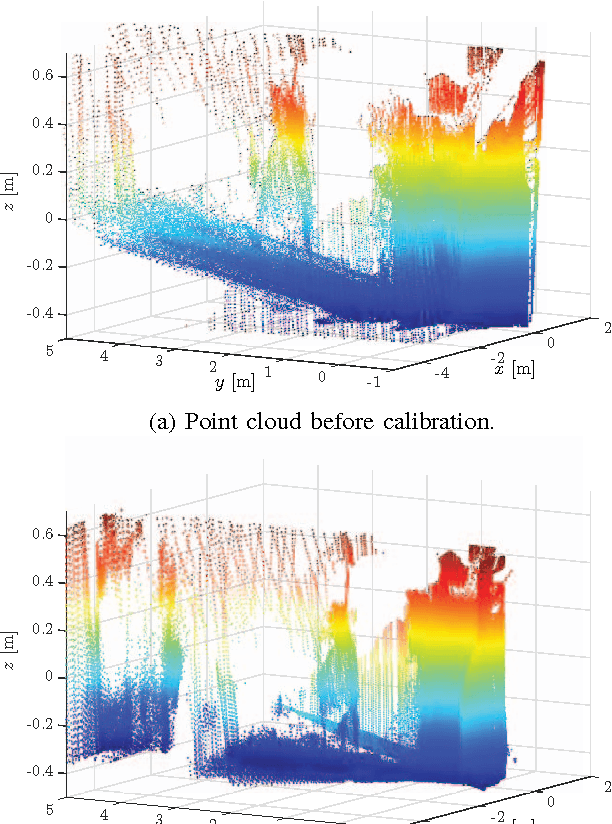
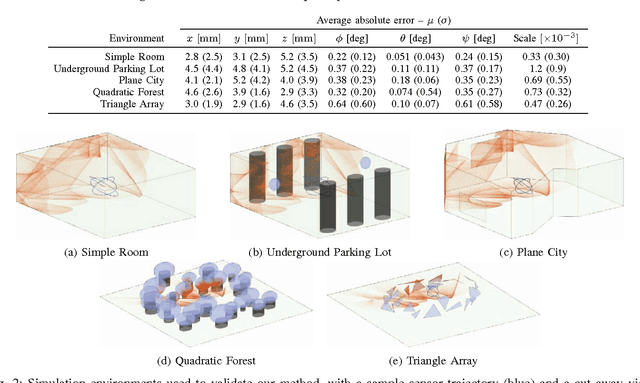
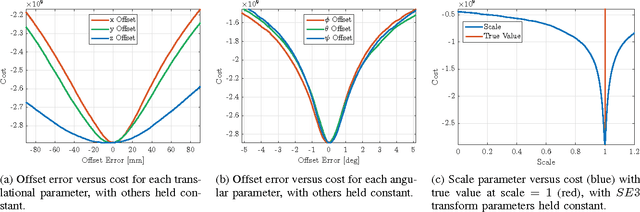
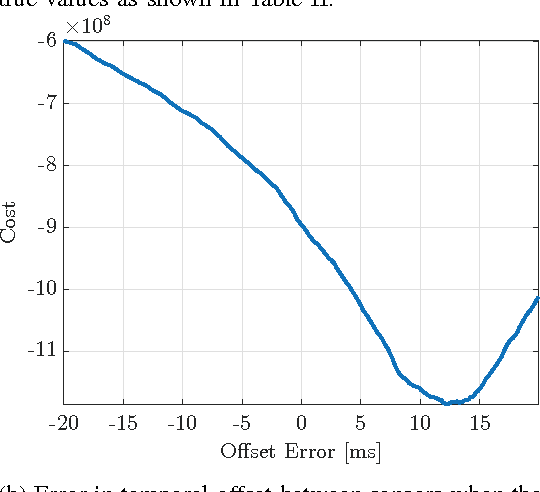
This paper explores the use of an entropy-based technique for point cloud reconstruction with the goal of calibrating a lidar to a sensor capable of providing egomotion information. We extend recent work in this area to the problem of recovering the $Sim(3)$ transformation between a 2D lidar and a rigidly attached monocular camera, where the scale of the camera trajectory is not known a priori. We demonstrate the robustness of our approach on realistic simulations in multiple environments, as well as on data collected from a hand-held sensor rig. Given a non-degenerate trajectory and a sufficient number of lidar measurements, our calibration procedure achieves millimetre-scale and sub-degree accuracy. Moreover, our method relaxes the need for specific scene geometry, fiducial markers, or overlapping sensor fields of view, which had previously limited similar techniques.