 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Transparent Object Pose Estimation: A Fusion of GDR-Net and Edge Detection
Paper and Code
Feb 17, 2025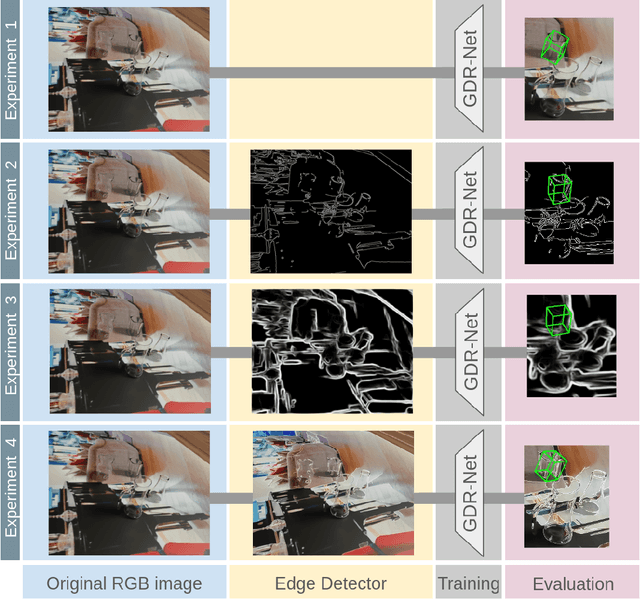
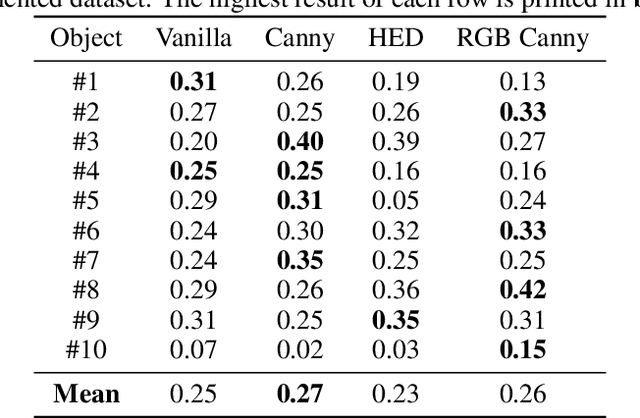
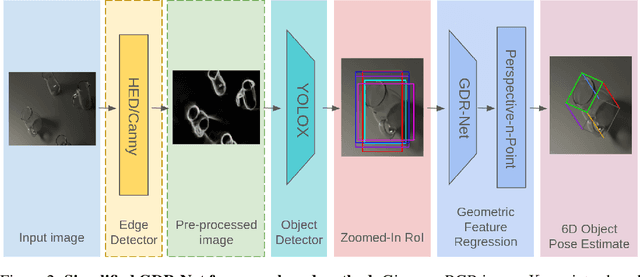
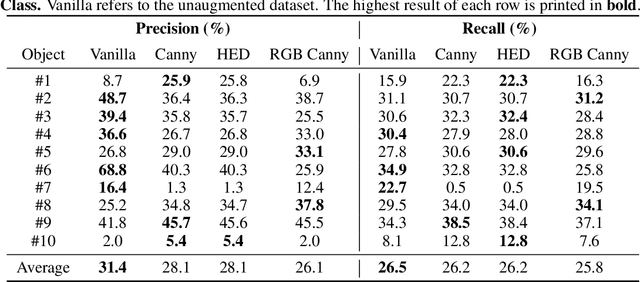
Object pose estimation of transparent objects remains a challenging task in the field of robot vision due to the immense influence of lighting, background, and reflections. However, the edges of clear objects have the highest contrast, which leads to stable and prominent features. We propose a novel approach by incorporating edge detection in a pre-processing step for the tasks of object detection and object pose estimation. We conducted experiments to investigate the effect of edge detectors on transparent objects. We examine the performance of the state-of-the-art 6D object pose estimation pipeline GDR-Net and the object detector YOLOX when applying different edge detectors as pre-processing steps (i.e., Canny edge detection with and without color information, and holistically-nested edges (HED)). We evaluate the physically-based rendered dataset Trans6D-32 K of transparent objects with parameters proposed by the BOP Challenge. Our results indicate that applying edge detection as a pre-processing enhances performance for certain objects.