 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Deformable Local Features by Jointly Learning to Detect and Describe Keypoints
Paper and Code
Apr 02, 2023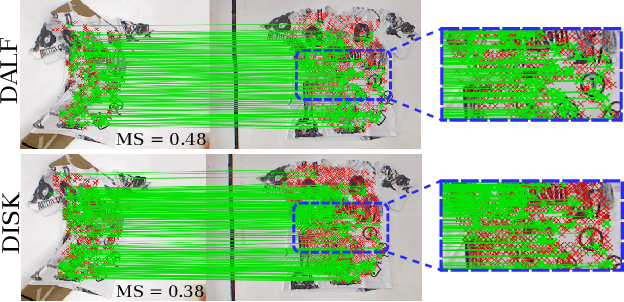

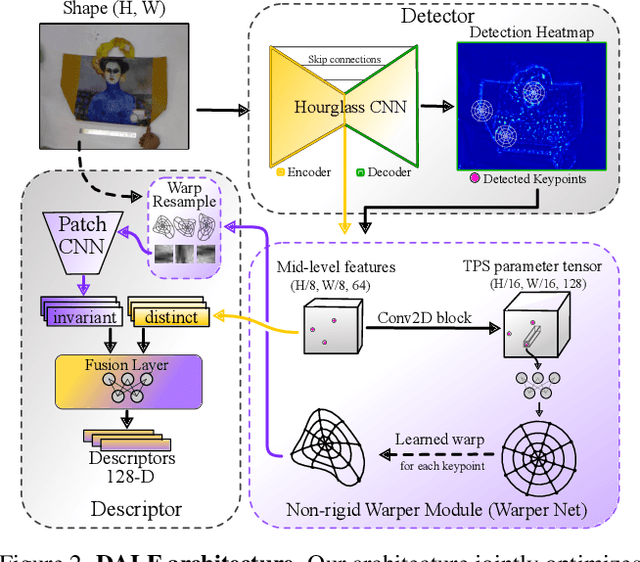

Local feature extraction is a standard approach in computer vision for tackling important tasks such as image matching and retrieval. The core assumption of most methods is that images undergo affine transformations, disregarding more complicated effects such as non-rigid deformations. Furthermore, incipient works tailored for non-rigid correspondence still rely on keypoint detectors designed for rigid transformations, hindering performance due to the limitations of the detector. We propose DALF (Deformation-Aware Local Features), a novel deformation-aware network for jointly detecting and describing keypoints, to handle the challenging problem of matching deformable surfaces. All network components work cooperatively through a feature fusion approach that enforces the descriptors' distinctiveness and invariance. Experiments using real deforming objects showcase the superiority of our method, where it delivers 8% improvement in matching scores compared to the previous best results. Our approach also enhances the performance of two real-world applications: deformable object retrieval and non-rigid 3D surface registration. Code for training, inference, and applications are publicly available at https://verlab.dcc.ufmg.br/descriptors/dalf_cvpr23.