 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Target Localization with Deployable Multiplatform Radar Nodes Based on Non-Convex Constrained Least Squares Optimization
Paper and Code
Apr 23, 2021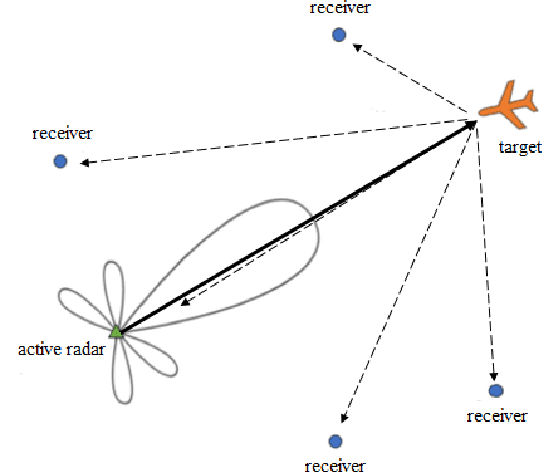



A new algorithm for 3D localization in multiplatform radar networks, comprising one transmitter and multiple receivers, is proposed. To take advantage of the monostatic sensor radiation pattern features, ad-hoc constraints are imposed in the target localization process. Therefore, the localization problem is formulated as a non-convex constrained Least Squares (LS) optimization problem which is globally solved in a quasi-closed-form leveraging Karush-Kuhn-Tucker (KKT) conditions. The performance of the new algorithm is assessed in terms of Root Mean Square Error (RMSE) in comparison with the benchmark Cramer Rao Lower Bound (CRLB) and some competitors from the open literature. The results corroborate the effectiveness of the new strategy which is capable of ensuring a lower RMSE than the counterpart methodologies especially in the low Signal to Noise Ratio (SNR) regime.