 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Position Estimation in Tactile Internet-Enabled Remote Robotic Surgery Using MOESP-Based Kalman Filter
Paper and Code
Jan 27, 2025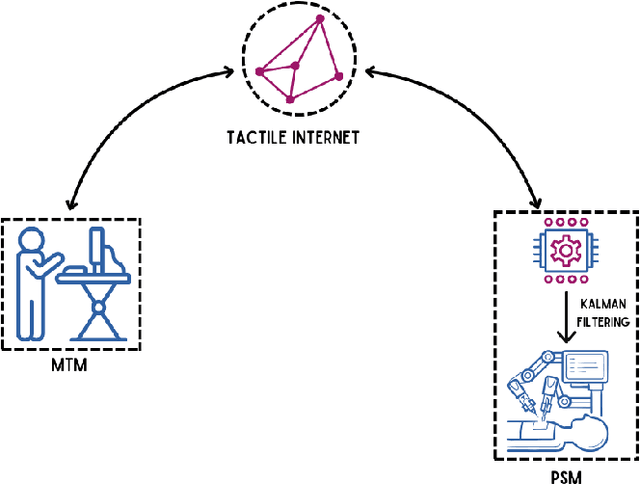
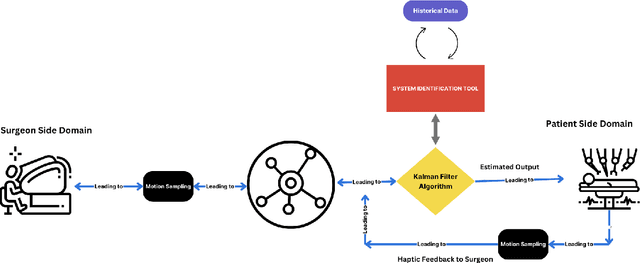


Accurately estimating the position of a patient's side robotic arm in real time during remote surgery is a significant challenge, especially within Tactile Internet (TI) environments. This paper presents a new and efficient method for position estimation using a Kalman Filter (KF) combined with the Multivariable Output-Error State Space (MOESP) method for system identification. Unlike traditional approaches that require prior knowledge of the system's dynamics, this study uses the JIGSAW dataset, a comprehensive collection of robotic surgical data, along with input from the Master Tool Manipulator (MTM) to derive the state-space model directly. The MOESP method allows accurate modeling of the Patient Side Manipulator (PSM) dynamics without prior system models, improving the KF's performance under simulated network conditions, including delays, jitter, and packet loss. These conditions mimic real-world challenges in Tactile Internet applications. The findings demonstrate the KF's improved resilience and accuracy in state estimation, achieving over 95 percent accuracy despite network-induced uncertainties.