 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-based Legged Robots Terrain Traversability Modeling via Deep Inverse Reinforcement Learning
Paper and Code
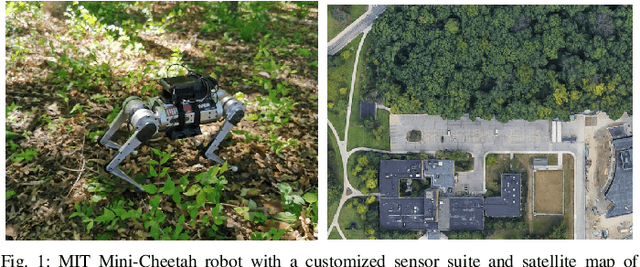
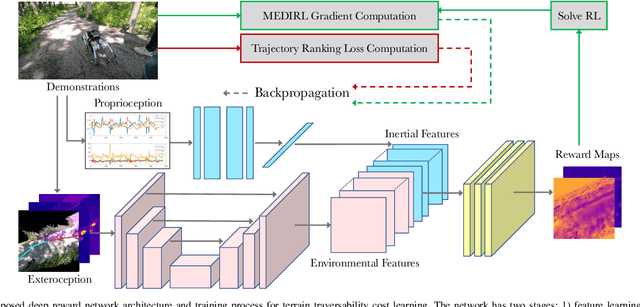
This work reports on developing a deep inverse reinforcement learning method for legged robots terrain traversability modeling that incorporates both exteroceptive and proprioceptive sensory data. Existing works use robot-agnostic exteroceptive environmental features or handcrafted kinematic features; instead, we propose to also learn robot-specific inertial features from proprioceptive sensory data for reward approximation in a single deep neural network. Incorporating the inertial features can improve the model fidelity and provide a reward that depends on the robot's state during deployment. We train the reward network using the Maximum Entropy Deep Inverse Reinforcement Learning (MEDIRL) algorithm and propose simultaneously minimizing a trajectory ranking loss to deal with the suboptimality of legged robot demonstrations. The demonstrated trajectories are ranked by locomotion energy consumption, in order to learn an energy-aware reward function and a more energy-efficient policy than demonstration. We evaluate our method using a dataset collected by an MIT Mini-Cheetah robot and a Mini-Cheetah simulator. The code is publicly available at https://github.com/ganlumomo/minicheetah-traversability-irl.