 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Aware Routing Algorithm for Mobile Ground-to-Air Charging
Paper and Code
Sep 30, 2023
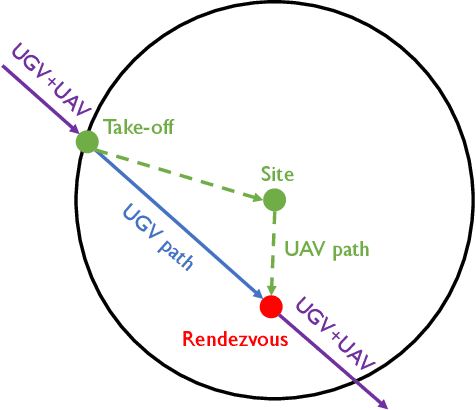
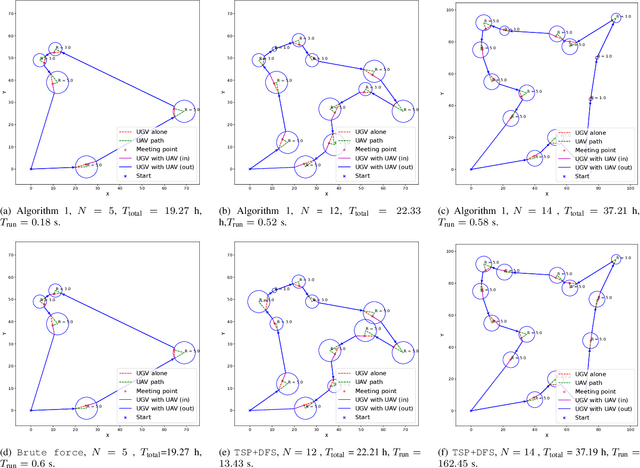
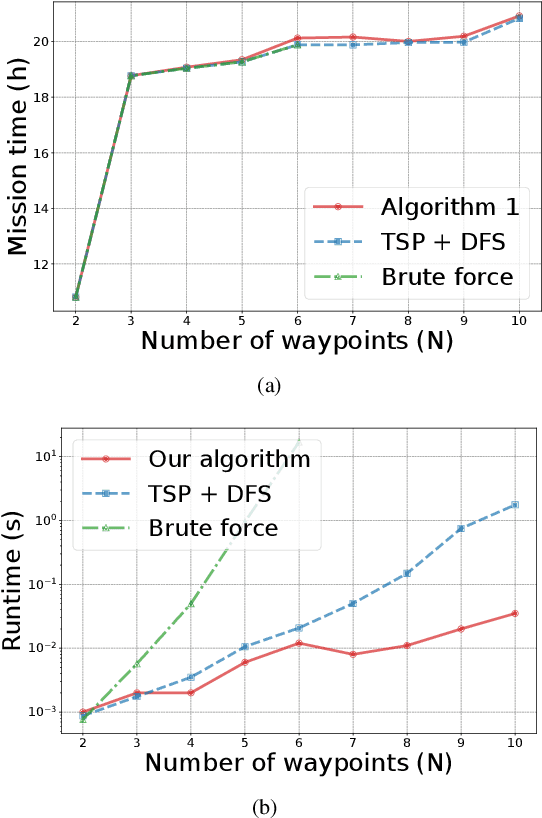
We investigate the problem of energy-constrained planning for a cooperative system of an Unmanned Ground Vehicles (UGV) and an Unmanned Aerial Vehicle (UAV). In scenarios where the UGV serves as a mobile base to ferry the UAV and as a charging station to recharge the UAV, we formulate a novel energy-constrained routing problem. To tackle this problem, we design an energy-aware routing algorithm, aiming to minimize the overall mission duration under the energy limitations of both vehicles. The algorithm first solves a Traveling Salesman Problem (TSP) to generate a guided tour. Then, it employs the Monte-Carlo Tree Search (MCTS) algorithm to refine the tour and generate paths for the two vehicles. We evaluate the performance of our algorithm through extensive simulations and a proof-of-concept experiment. The results show that our algorithm consistently achieves near-optimal mission time and maintains fast running time across a wide range of problem instances.