 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end Reinforcement Learning for Online Coverage Path Planning in Unknown Environments
Paper and Code
Jun 29, 2023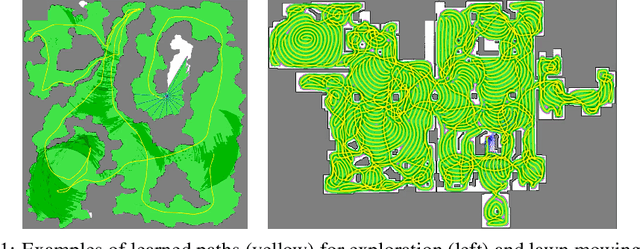
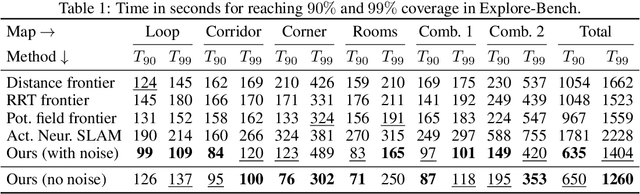
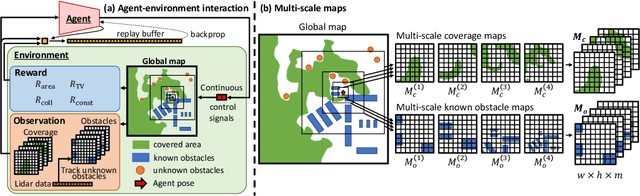
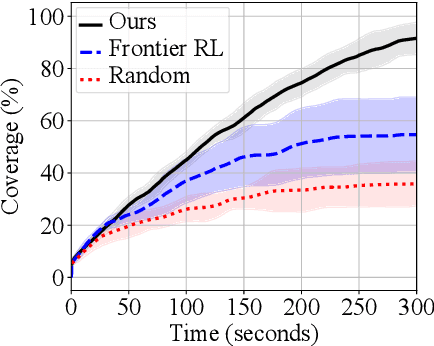
Coverage path planning is the problem of finding the shortest path that covers the entire free space of a given confined area, with applications ranging from robotic lawn mowing and vacuum cleaning, to demining and search-and-rescue tasks. While offline methods can find provably complete, and in some cases optimal, paths for known environments, their value is limited in online scenarios where the environment is not known beforehand, especially in the presence of non-static obstacles. We propose an end-to-end reinforcement learning-based approach in continuous state and action space, for the online coverage path planning problem that can handle unknown environments. We construct the observation space from both global maps and local sensory inputs, allowing the agent to plan a long-term path, and simultaneously act on short-term obstacle detections. To account for large-scale environments, we propose to use a multi-scale map input representation. Furthermore, we propose a novel total variation reward term for eliminating thin strips of uncovered space in the learned path. To validate the effectiveness of our approach, we perform extensive experiments in simulation with a distance sensor, surpassing the performance of a recent reinforcement learning-based approach.