 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Partially Observable Visual Navigation in a Diverse Environment
Paper and Code
Sep 16, 2021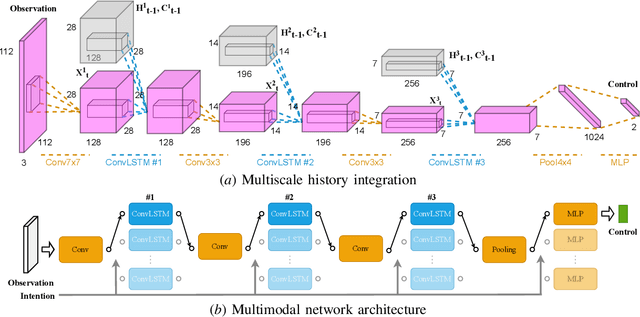
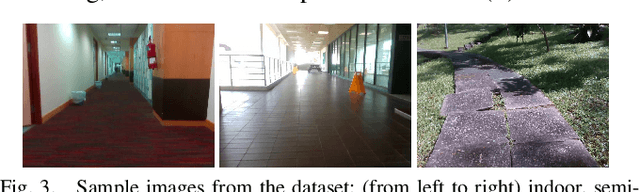
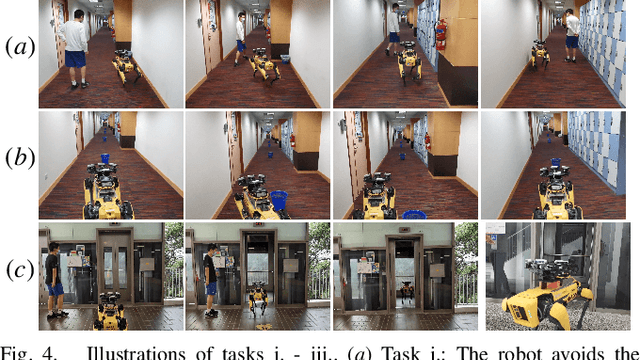
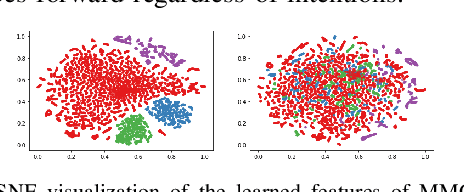
How can a robot navigate successfully in a rich and diverse environment, indoors or outdoors, along an office corridor or a trail in the park, on the flat ground, the staircase, or the elevator, etc.? To this end, this work aims at three challenges: (i) complex visual observations, (ii) partial observability of local sensing, and (iii) multimodal navigation behaviors that depend on both the local environment and the high-level goal. We propose a novel neural network (NN) architecture to represent a local controller and leverage the flexibility of the end-to-end approach to learn a powerful policy. To tackle complex visual observations, we extract multiscale spatial information through convolution layers. To deal with partial observability, we encode rich history information in LSTM-like modules. Importantly, we integrate the two into a single unified architecture that exploits convolutional memory cells to track the observation history at multiple spatial scales, which can capture the complex spatiotemporal dependencies between observations and controls. We additionally condition the network on the high-level goal in order to generate different navigation behavior modes. Specifically, we propose to use independent memory cells for different modes to prevent mode collapse in the learned policy. We implemented the NN controller on the SPOT robot and evaluate it on three challenging tasks with partial observations: adversarial pedestrian avoidance, blind-spot obstacle avoidance, and elevator riding. Our model significantly outperforms CNNs, conventional LSTMs, or the ablated versions of our model. A demo video will be publicly available, showing our SPOT robot traversing many different locations on our university campus.