 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Learning of Multi-category 3D Pose and Shape Estimation
Paper and Code
Dec 19, 2021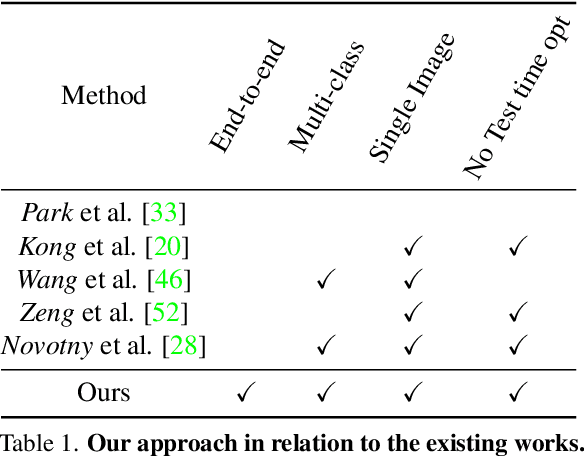
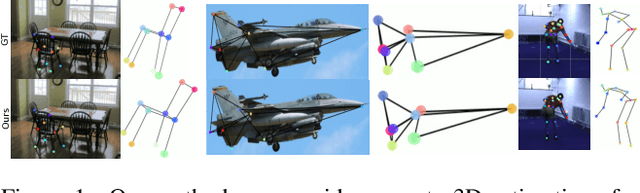
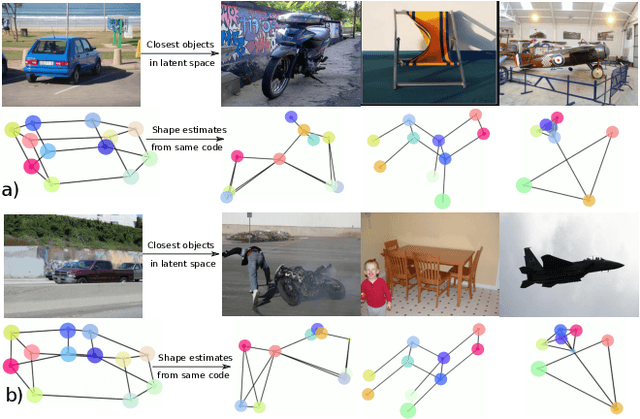
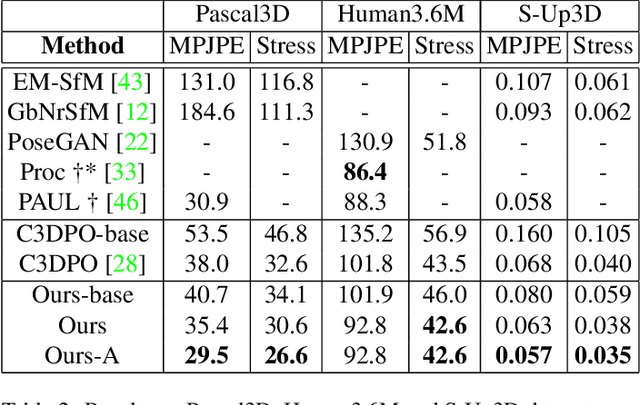
In this paper, we study the representation of the shape and pose of objects using their keypoints. Therefore, we propose an end-to-end method that simultaneously detects 2D keypoints from an image and lifts them to 3D. The proposed method learns both 2D detection and 3D lifting only from 2D keypoints annotations. In this regard, a novel method that explicitly disentangles the pose and 3D shape by means of augmentation-based cyclic self-supervision is proposed, for the first time. In addition of being end-to-end in image to 3D learning, our method also handles objects from multiple categories using a single neural network. We use a Transformer-based architecture to detect the keypoints, as well as to summarize the visual context of the image. This visual context information is then used while lifting the keypoints to 3D, so as to allow the context-based reasoning for better performance. While lifting, our method learns a small set of basis shapes and their sparse non-negative coefficients to represent the 3D shape in canonical frame. Our method can handle occlusions as well as wide variety of object classes. Our experiments on three benchmarks demonstrate that our method performs better than the state-of-the-art. Our source code will be made publicly available.