 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmploying traditional machine learning algorithms for big data streams analysis: the case of object trajectory prediction
Paper and Code
Sep 01, 2016
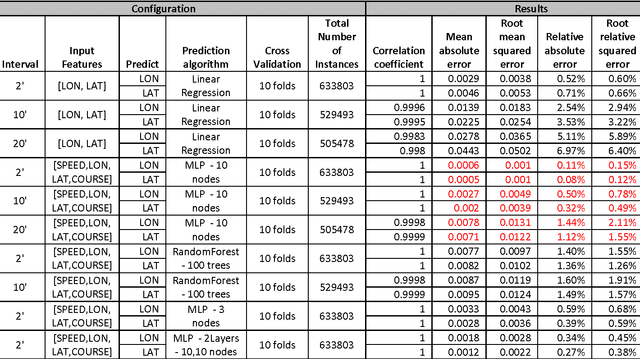


In this paper, we model the trajectory of sea vessels and provide a service that predicts in near-real time the position of any given vessel in 4', 10', 20' and 40' time intervals. We explore the necessary tradeoffs between accuracy, performance and resource utilization are explored given the large volume and update rates of input data. We start with building models based on well-established machine learning algorithms using static datasets and multi-scan training approaches and identify the best candidate to be used in implementing a single-pass predictive approach, under real-time constraints. The results are measured in terms of accuracy and performance and are compared against the baseline kinematic equations. Results show that it is possible to efficiently model the trajectory of multiple vessels using a single model, which is trained and evaluated using an adequately large, static dataset, thus achieving a significant gain in terms of resource usage while not compromising accuracy.