Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEGAD! an Evolved Grasping Analysis Dataset for diversity and reproducibility in robotic manipulation
Paper and Code


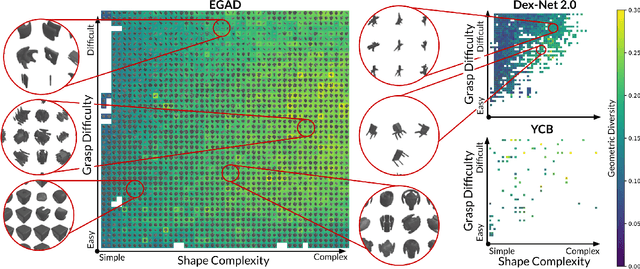
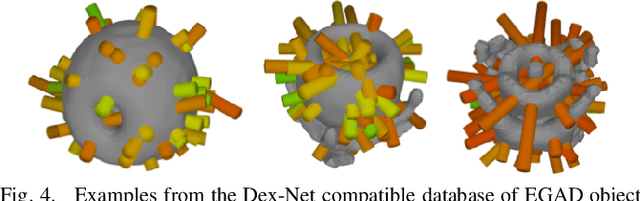
We present the Evolved Grasping Analysis Dataset (EGAD), comprising over 2000 generated objects aimed at training and evaluating robotic visual grasp detection algorithms. The objects in EGAD are geometrically diverse, filling a space ranging from simple to complex shapes and from easy to difficult to grasp, compared to other datasets for robotic grasping, which may be limited in size or contain only a small number of object classes. Additionally, we specify a set of 49 diverse 3D-printable evaluation objects to encourage reproducible testing of robotic grasping systems across a range of complexity and difficulty. The dataset, code and videos can be found at https://dougsm.github.io/egad/
* Submitted to RA-L & IROS 2020. 8 pages. The dataset, code and videos
can be found at https://dougsm.github.io/egad/
View paper on