 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Trajectory Planning for Multiple Non-holonomic Mobile Robots via Prioritized Trajectory Optimization
Paper and Code
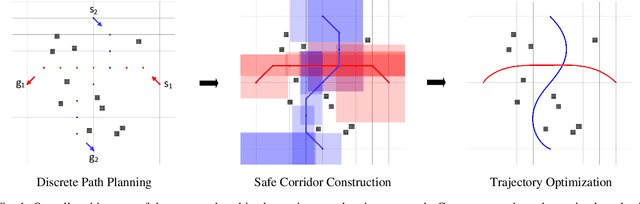

In this paper, we present a novel approach to efficiently generate collision-free optimal trajectories for multiple non-holonomic mobile robots in obstacle-rich environments. Our approach first employs a graph-based multi-agent path planner to find an initial discrete solution, and then refines this solution into smooth trajectories using nonlinear optimization. We divide the robot team into small groups and propose a prioritized trajectory optimization method to improve the scalability of the algorithm. Infeasible sub-problems may arise in some scenarios because of the decoupled optimization framework. To handle this problem, a novel grouping and priority assignment strategy is developed to increase the probability of finding feasible trajectories. Compared to the coupled trajectory optimization, the proposed approach reduces the computation time considerably with a small impact on the optimality of the plans. Simulations and hardware experiments verified the effectiveness and superiority of the proposed approach.