 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Policy Evaluation with Safety Constraint for Reinforcement Learning
Paper and Code
Oct 08, 2024
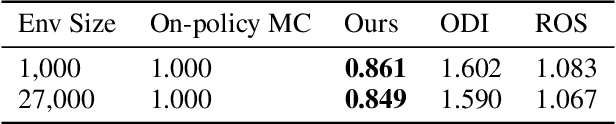

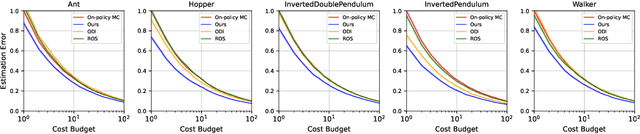
In reinforcement learning, classic on-policy evaluation methods often suffer from high variance and require massive online data to attain the desired accuracy. Previous studies attempt to reduce evaluation variance by searching for or designing proper behavior policies to collect data. However, these approaches ignore the safety of such behavior policies -- the designed behavior policies have no safety guarantee and may lead to severe damage during online executions. In this paper, to address the challenge of reducing variance while ensuring safety simultaneously, we propose an optimal variance-minimizing behavior policy under safety constraints. Theoretically, while ensuring safety constraints, our evaluation method is unbiased and has lower variance than on-policy evaluation. Empirically, our method is the only existing method to achieve both substantial variance reduction and safety constraint satisfaction. Furthermore, we show our method is even superior to previous methods in both variance reduction and execution safety.