 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Point Clouds Upsampling via Flow Matching
Paper and Code
Jan 25, 2025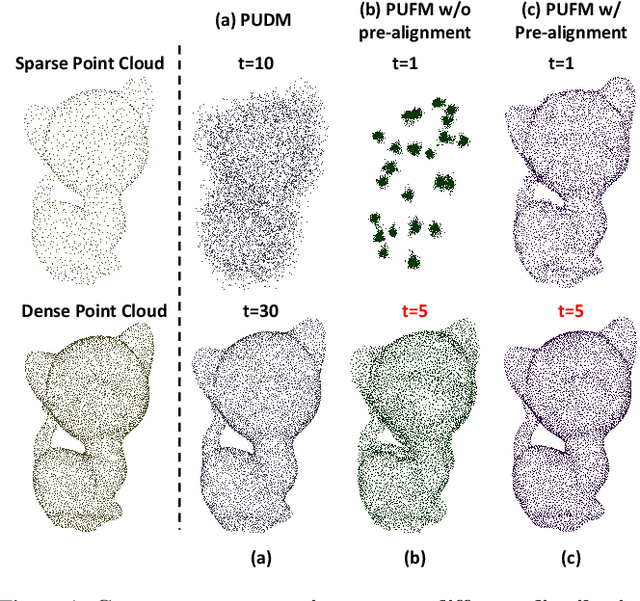
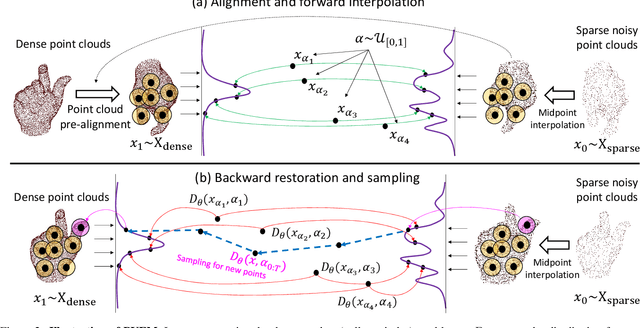
Diffusion models are a powerful framework for tackling ill-posed problems, with recent advancements extending their use to point cloud upsampling. Despite their potential, existing diffusion models struggle with inefficiencies as they map Gaussian noise to real point clouds, overlooking the geometric information inherent in sparse point clouds. To address these inefficiencies, we propose PUFM, a flow matching approach to directly map sparse point clouds to their high-fidelity dense counterparts. Our method first employs midpoint interpolation to sparse point clouds, resolving the density mismatch between sparse and dense point clouds. Since point clouds are unordered representations, we introduce a pre-alignment method based on Earth Mover's Distance (EMD) optimization to ensure coherent interpolation between sparse and dense point clouds, which enables a more stable learning path in flow matching. Experiments on synthetic datasets demonstrate that our method delivers superior upsampling quality but with fewer sampling steps. Further experiments on ScanNet and KITTI also show that our approach generalizes well on RGB-D point clouds and LiDAR point clouds, making it more practical for real-world applications.