 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Multi-Frequency Phase Unwrapping using Kernel Density Estimation
Paper and Code
Aug 18, 2016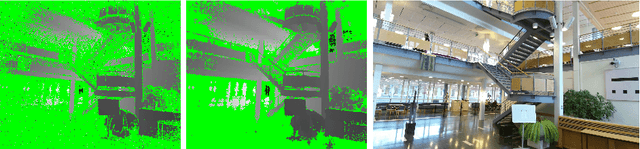
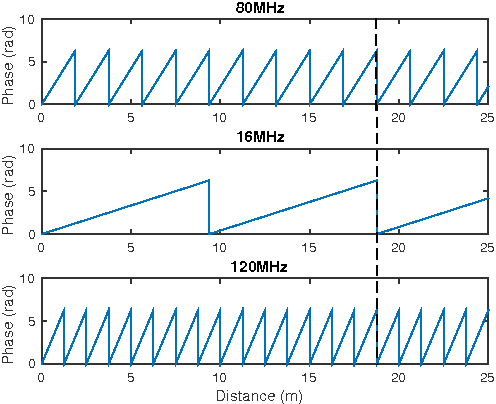
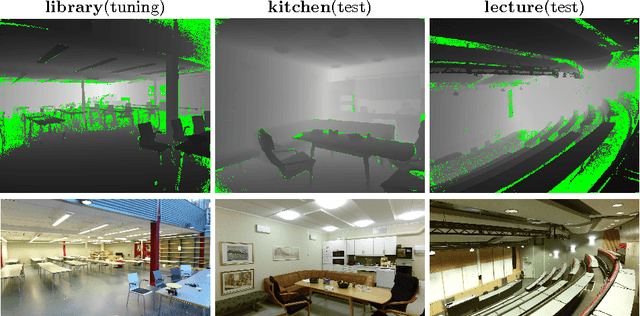
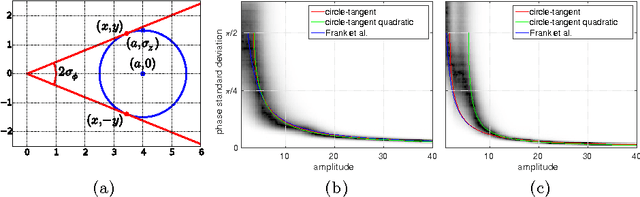
In this paper we introduce an efficient method to unwrap multi-frequency phase estimates for time-of-flight ranging. The algorithm generates multiple depth hypotheses and uses a spatial kernel density estimate (KDE) to rank them. The confidence produced by the KDE is also an effective means to detect outliers. We also introduce a new closed-form expression for phase noise prediction, that better fits real data. The method is applied to depth decoding for the Kinect v2 sensor, and compared to the Microsoft Kinect SDK and to the open source driver libfreenect2. The intended Kinect v2 use case is scenes with less than 8m range, and for such cases we observe consistent improvements, while maintaining real-time performance. When extending the depth range to the maximal value of 8.75m, we get about 52% more valid measurements than libfreenect2. The effect is that the sensor can now be used in large depth scenes, where it was previously not a good choice. Code and supplementary material are available at http://www.cvl.isy.liu.se/research/datasets/kinect2-dataset.