 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Multi-Contact Pattern Generation with Sequential Convex Approximations of the Centroidal Dynamics
Paper and Code
Oct 02, 2020
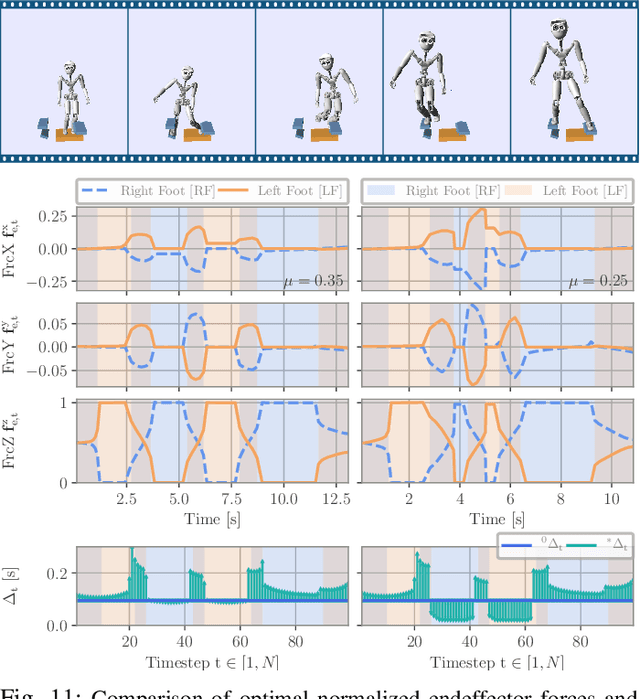
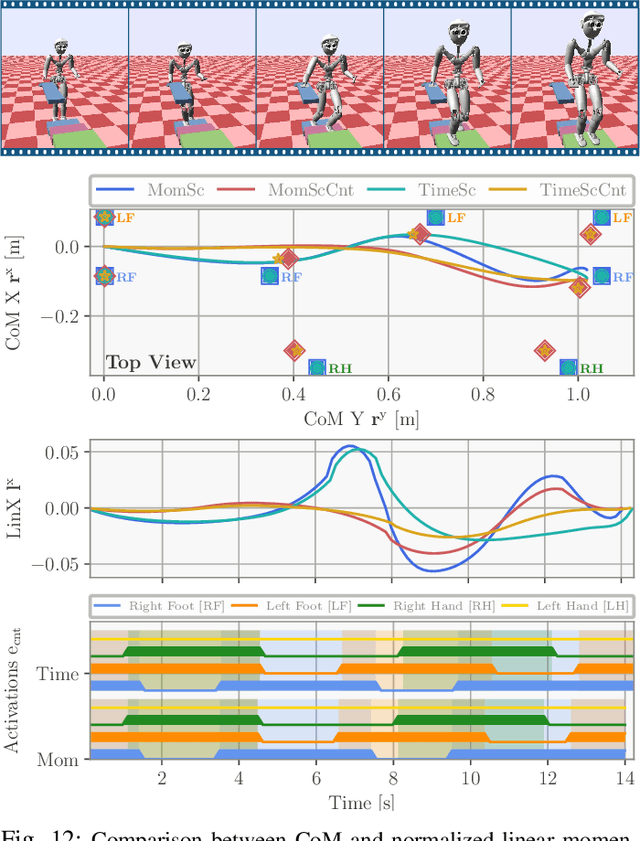
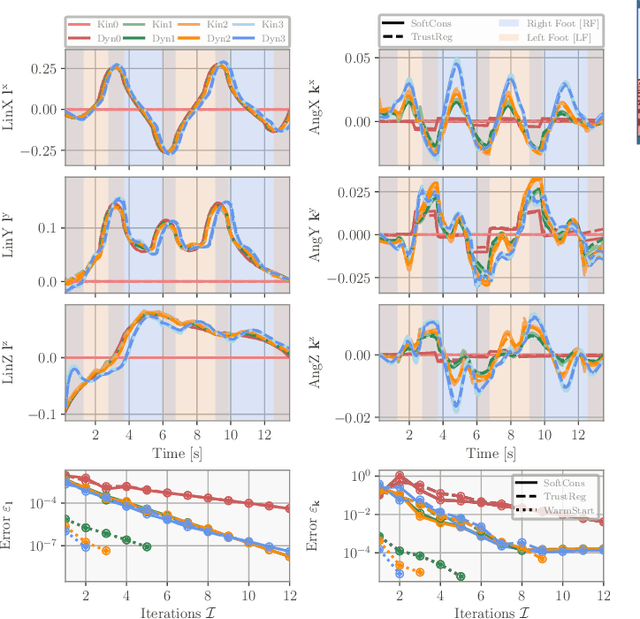
This paper investigates the problem of efficient computation of physically consistent multi-contact behaviors. Recent work showed that under mild assumptions, the problem could be decomposed into simpler kinematic and centroidal dynamic optimization problems. Based on this approach, we propose a general convex relaxation of the centroidal dynamics leading to two computationally efficient algorithms based on iterative resolutions of second order cone programs. They optimize centroidal trajectories, contact forces and, importantly, the timing of the motions. We include the approach in a kino-dynamic optimization method to generate full-body movements. Finally, the approach is embedded in a mixed-integer solver to further find dynamically consistent contact sequences. Extensive numerical experiments demonstrate the computational efficiency of the approach, suggesting that it could be used in a fast receding horizon control loop. Executions of the planned motions on simulated humanoids and quadrupeds and on a real quadruped robot further show the quality of the optimized motions.