 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Model Learning for Human-Robot Collaborative Tasks
Paper and Code
May 24, 2014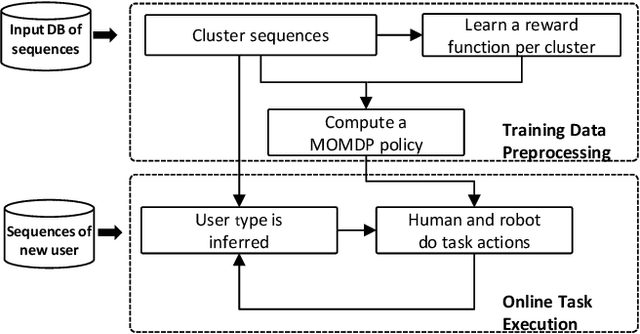

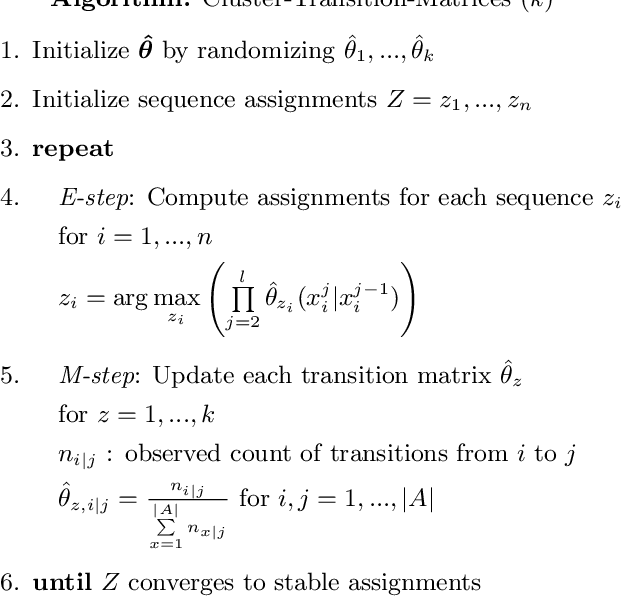
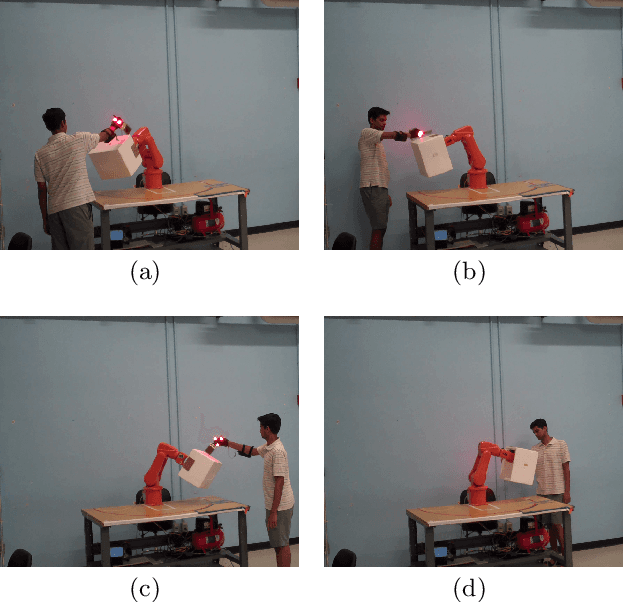
We present a framework for learning human user models from joint-action demonstrations that enables the robot to compute a robust policy for a collaborative task with a human. The learning takes place completely automatically, without any human intervention. First, we describe the clustering of demonstrated action sequences into different human types using an unsupervised learning algorithm. These demonstrated sequences are also used by the robot to learn a reward function that is representative for each type, through the employment of an inverse reinforcement learning algorithm. The learned model is then used as part of a Mixed Observability Markov Decision Process formulation, wherein the human type is a partially observable variable. With this framework, we can infer, either offline or online, the human type of a new user that was not included in the training set, and can compute a policy for the robot that will be aligned to the preference of this new user and will be robust to deviations of the human actions from prior demonstrations. Finally we validate the approach using data collected in human subject experiments, and conduct proof-of-concept demonstrations in which a person performs a collaborative task with a small industrial robot.