 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Continuous-Time Ego-Motion Estimation for Asynchronous Event-based Data Associations
Paper and Code
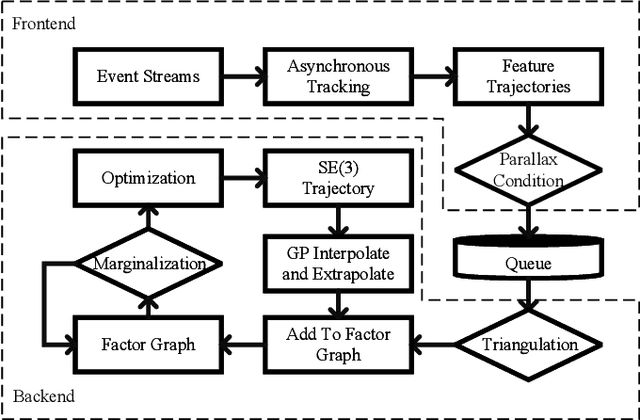
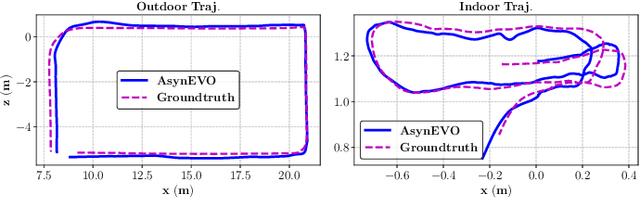
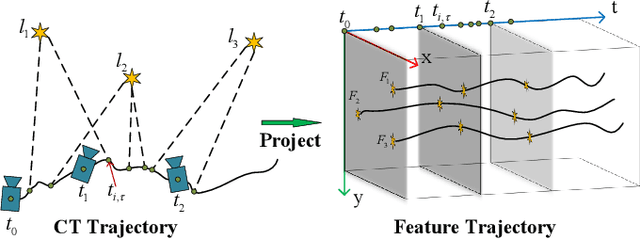

Event cameras are bio-inspired vision sensors that asynchronously measure per-pixel brightness changes. The high temporal resolution and asynchronicity of event cameras offer great potential for estimating the robot motion state. Recent works have adopted the continuous-time ego-motion estimation methods to exploit the inherent nature of event cameras. However, most of the adopted methods have poor real-time performance. To alleviate it, a lightweight Gaussian Process (GP)-based estimation framework is proposed to efficiently estimate motion trajectory from asynchronous event-driven data associations. Concretely, an asynchronous front-end pipeline is designed to adapt event-driven feature trackers and generate feature trajectories from event streams; a parallel dynamic sliding-window back-end is presented within the framework of sparse GP regression on SE(3). Notably, a specially designed state marginalization strategy is employed to ensure the consistency and sparsity of this GP regression. Experiments conducted on synthetic and real-world datasets demonstrate that the proposed method achieves competitive precision and superior robustness compared to the state-of-the-art. Furthermore, the evaluations on three 60 s trajectories show that the proposal outperforms the ISAM2-based method in terms of computational efficiency by 2.64, 4.22, and 11.70 times, respectively.