 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Probabilistic Adaptive Voxel Mapping for Accurate Online 3D SLAM
Paper and Code
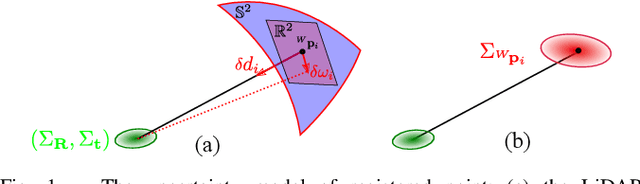
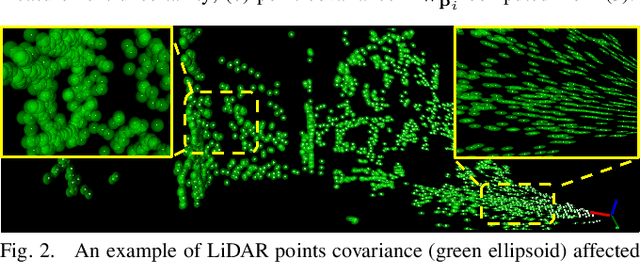
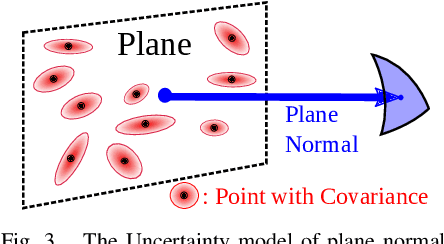
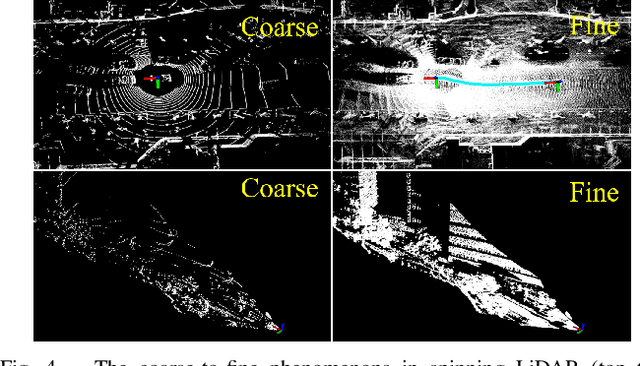
This paper proposes an efficient and probabilistic adaptive voxel mapping method for 3D SLAM. An accurate uncertainty model of point and plane is proposed for probabilistic plane representation. We analyze the need for coarse-to-fine voxel mapping and then use a novel voxel map organized by a Hash table and octrees to build and update the map efficiently. We apply the voxel map to the iterated Kalman filter and construct the maximum posterior probability problem for pose estimation. The experiments on the open KITTI dataset show the high accuracy and efficiency of our method in contrast with other state-of-the-art. Outdoor experiments on unstructured environments with non-repetitive scanning LiDAR further verify the adaptability of our mapping method to different environments and LiDAR scanning patterns.