 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Differentiable Shadow Computation for Inverse Problems
Paper and Code
Apr 01, 2021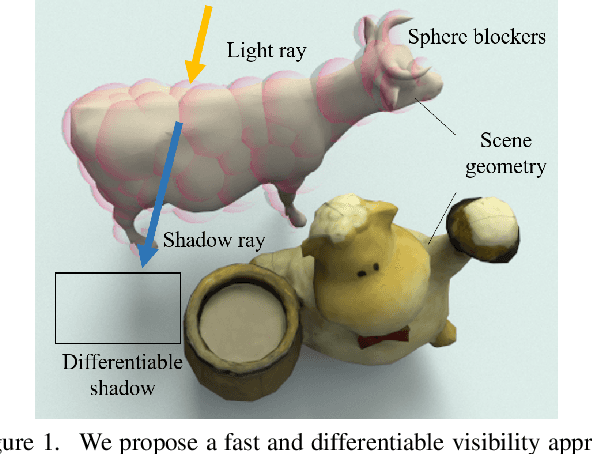
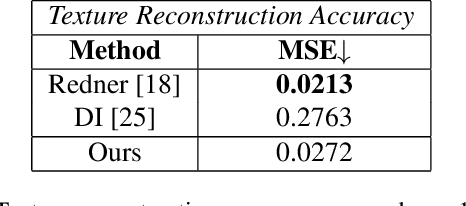
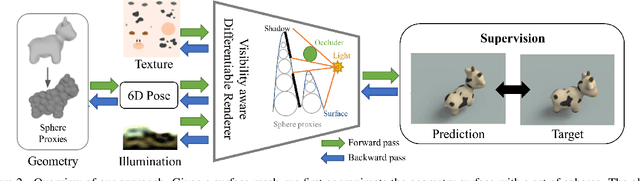
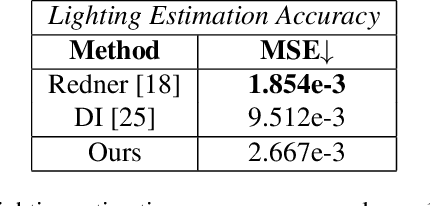
Differentiable rendering has received increasing interest for image-based inverse problems. It can benefit traditional optimization-based solutions to inverse problems, but also allows for self-supervision of learning-based approaches for which training data with ground truth annotation is hard to obtain. However, existing differentiable renderers either do not model visibility of the light sources from the different points in the scene, responsible for shadows in the images, or are too slow for being used to train deep architectures over thousands of iterations. To this end, we propose an accurate yet efficient approach for differentiable visibility and soft shadow computation. Our approach is based on the spherical harmonics approximations of the scene illumination and visibility, where the occluding surface is approximated with spheres. This allows for a significantly more efficient shadow computation compared to methods based on ray tracing. As our formulation is differentiable, it can be used to solve inverse problems such as texture, illumination, rigid pose, and geometric deformation recovery from images using analysis-by-synthesis optimization.