 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient 3D Point Cloud Feature Learning for Large-Scale Place Recognition
Paper and Code
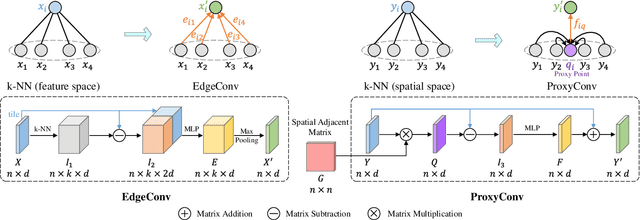
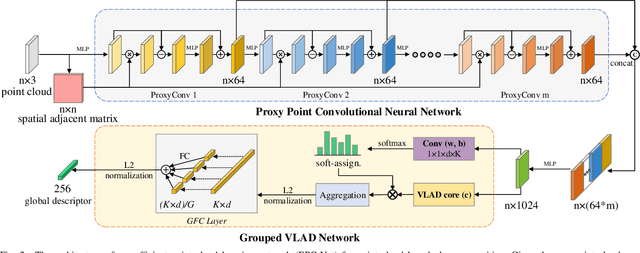
Point cloud based retrieval for place recognition is still a challenging problem due to drastic appearance and illumination changes of scenes in changing environments. Existing deep learning based global descriptors for the retrieval task usually consume a large amount of computation resources (e.g., memory), which may not be suitable for the cases of limited hardware resources. In this paper, we develop an efficient point cloud learning network (EPC-Net) to form a global descriptor for visual place recognition, which can obtain good performance and reduce computation memory and inference time. First, we propose a lightweight but effective neural network module, called ProxyConv, to aggregate the local geometric features of point clouds. We leverage the spatial adjacent matrix and proxy points to simplify the original edge convolution for lower memory consumption. Then, we design a lightweight grouped VLAD network (G-VLAD) to form global descriptors for retrieval. Compared with the original VLAD network, we propose a grouped fully connected (GFC) layer to decompose the high-dimensional vectors into a group of low-dimensional vectors, which can reduce the number of parameters of the network and maintain the discrimination of the feature vector. Finally, to further reduce the inference time, we develop a simple version of EPC-Net, called EPC-Net-L, which consists of two ProxyConv modules and one max pooling layer to aggregate global descriptors. By distilling the knowledge from EPC-Net, EPC-Net-L can obtain discriminative global descriptors for retrieval. Extensive experiments on the Oxford dataset and three in-house datasets demonstrate that our proposed method can achieve state-of-the-art performance with lower parameters, FLOPs, and runtime per frame.