 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEcoFusion: Energy-Aware Adaptive Sensor Fusion for Efficient Autonomous Vehicle Perception
Paper and Code
Feb 23, 2022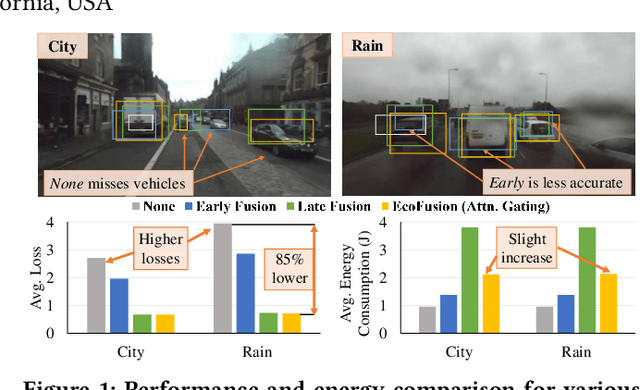
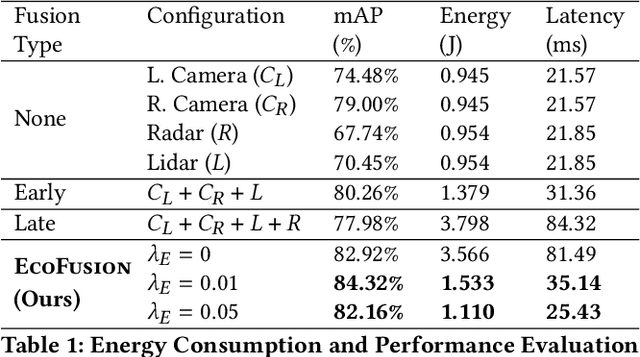
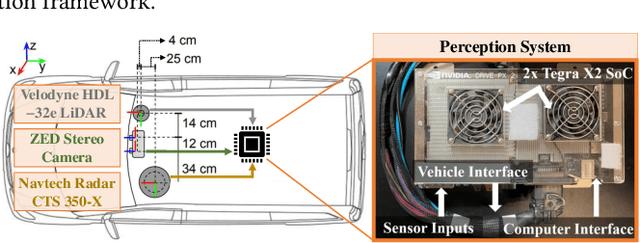
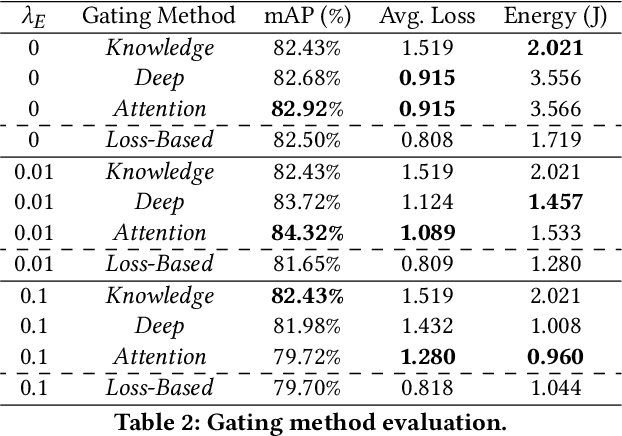
Autonomous vehicles use multiple sensors, large deep-learning models, and powerful hardware platforms to perceive the environment and navigate safely. In many contexts, some sensing modalities negatively impact perception while increasing energy consumption. We propose EcoFusion: an energy-aware sensor fusion approach that uses context to adapt the fusion method and reduce energy consumption without affecting perception performance. EcoFusion performs up to 9.5% better at object detection than existing fusion methods with approximately 60% less energy and 58% lower latency on the industry-standard Nvidia Drive PX2 hardware platform. We also propose several context-identification strategies, implement a joint optimization between energy and performance, and present scenario-specific results.