 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEco-driving for Electric Connected Vehicles at Signalized Intersections: A Parameterized Reinforcement Learning approach
Paper and Code
Jun 24, 2022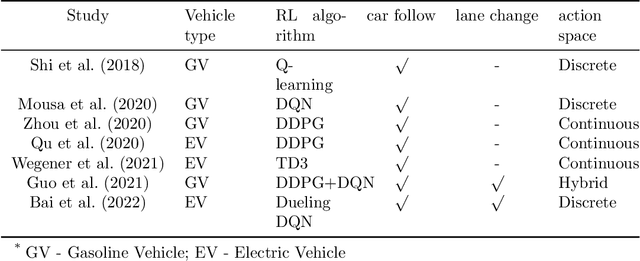
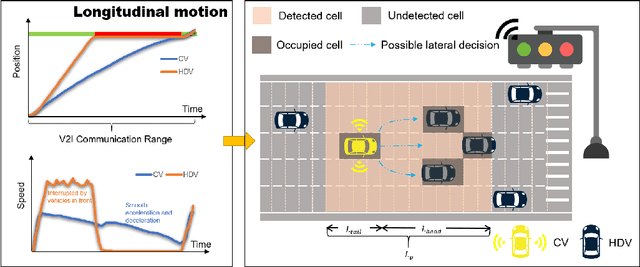
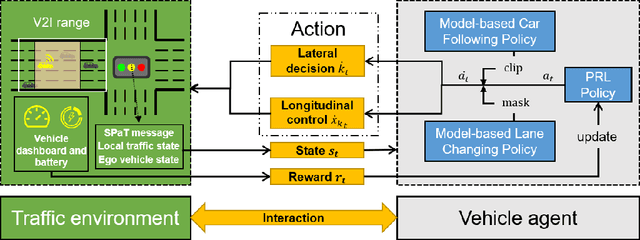
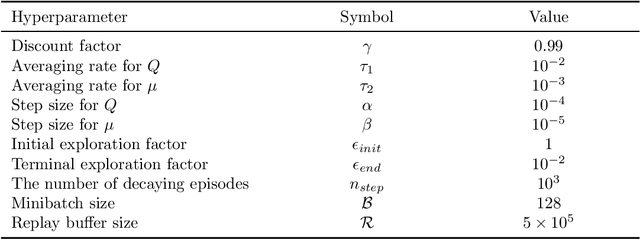
This paper proposes an eco-driving framework for electric connected vehicles (CVs) based on reinforcement learning (RL) to improve vehicle energy efficiency at signalized intersections. The vehicle agent is specified by integrating the model-based car-following policy, lane-changing policy, and the RL policy, to ensure safe operation of a CV. Subsequently, a Markov Decision Process (MDP) is formulated, which enables the vehicle to perform longitudinal control and lateral decisions, jointly optimizing the car-following and lane-changing behaviors of the CVs in the vicinity of intersections. Then, the hybrid action space is parameterized as a hierarchical structure and thereby trains the agents with two-dimensional motion patterns in a dynamic traffic environment. Finally, our proposed methods are evaluated in SUMO software from both a single-vehicle-based perspective and a flow-based perspective. The results show that our strategy can significantly reduce energy consumption by learning proper action schemes without any interruption of other human-driven vehicles (HDVs).