 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE(2)-Equivariant Graph Planning for Navigation
Paper and Code
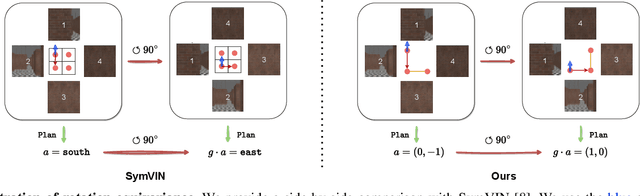
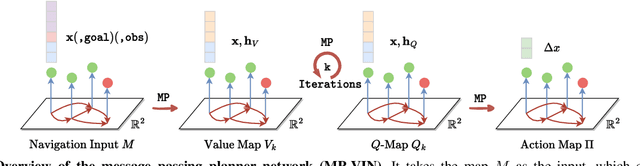
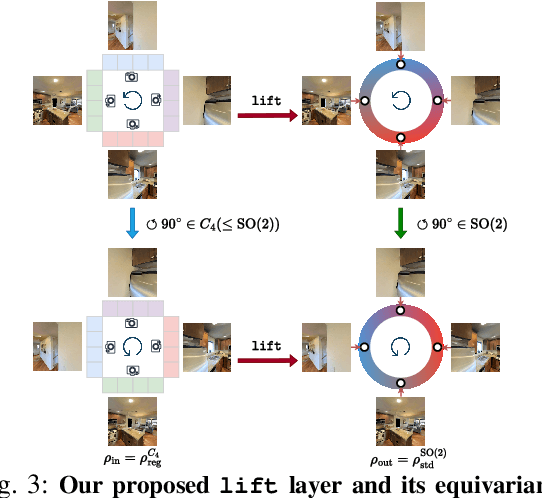

Learning for robot navigation presents a critical and challenging task. The scarcity and costliness of real-world datasets necessitate efficient learning approaches. In this letter, we exploit Euclidean symmetry in planning for 2D navigation, which originates from Euclidean transformations between reference frames and enables parameter sharing. To address the challenges of unstructured environments, we formulate the navigation problem as planning on a geometric graph and develop an equivariant message passing network to perform value iteration. Furthermore, to handle multi-camera input, we propose a learnable equivariant layer to lift features to a desired space. We conduct comprehensive evaluations across five diverse tasks encompassing structured and unstructured environments, along with maps of known and unknown, given point goals or semantic goals. Our experiments confirm the substantial benefits on training efficiency, stability, and generalization.