 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamical system prediction from sparse observations using deep neural networks with Voronoi tessellation and physics constraint
Paper and Code
Aug 31, 2024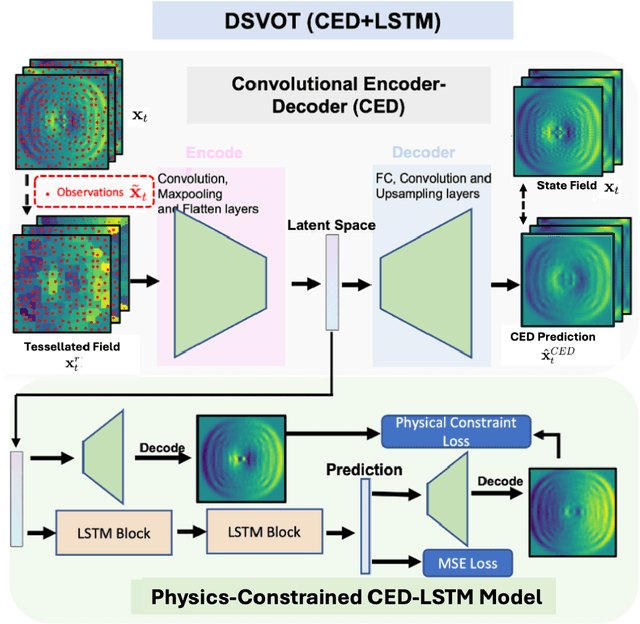

Despite the success of various methods in addressing the issue of spatial reconstruction of dynamical systems with sparse observations, spatio-temporal prediction for sparse fields remains a challenge. Existing Kriging-based frameworks for spatio-temporal sparse field prediction fail to meet the accuracy and inference time required for nonlinear dynamic prediction problems. In this paper, we introduce the Dynamical System Prediction from Sparse Observations using Voronoi Tessellation (DSOVT) framework, an innovative methodology based on Voronoi tessellation which combines convolutional encoder-decoder (CED) and long short-term memory (LSTM) and utilizing Convolutional Long Short-Term Memory (ConvLSTM). By integrating Voronoi tessellations with spatio-temporal deep learning models, DSOVT is adept at predicting dynamical systems with unstructured, sparse, and time-varying observations. CED-LSTM maps Voronoi tessellations into a low-dimensional representation for time series prediction, while ConvLSTM directly uses these tessellations in an end-to-end predictive model. Furthermore, we incorporate physics constraints during the training process for dynamical systems with explicit formulas. Compared to purely data-driven models, our physics-based approach enables the model to learn physical laws within explicitly formulated dynamics, thereby enhancing the robustness and accuracy of rolling forecasts. Numerical experiments on real sea surface data and shallow water systems clearly demonstrate our framework's accuracy and computational efficiency with sparse and time-varying observations.