 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Prediction of Origin-Destination Flows Using Fusion Line Graph Convolutional Networks
Paper and Code
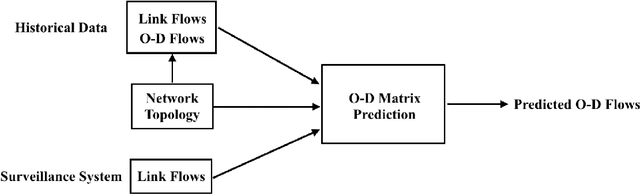
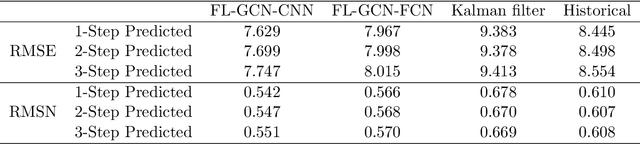
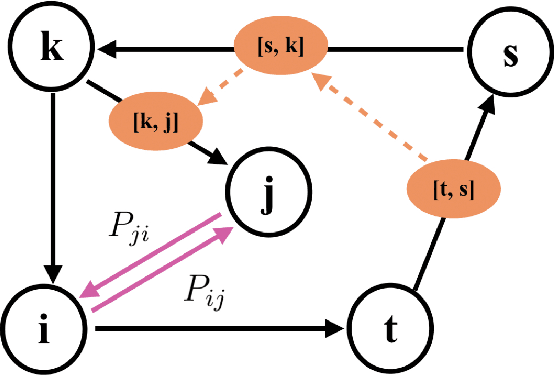
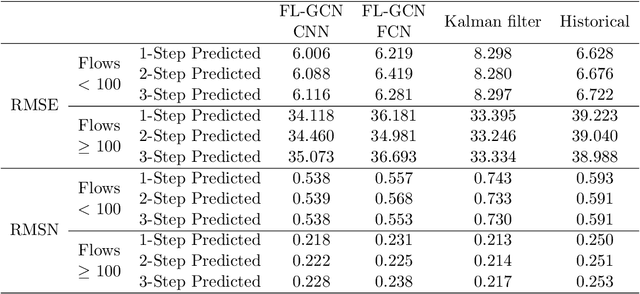
Modern intelligent transportation systems provide data that allow real-time demand prediction, which is essential for planning and operations. The main challenge of prediction of Origin-Destination (O-D) flow matrices is that demands cannot be directly measured by traffic sensors; instead, they have to be inferred from aggregate traffic flow data on traffic links. Specifically, spatial correlation, congestion and time dependent factors need to be considered in general transportation networks. In this paper we propose a novel O-D prediction framework based on Fusion Line Graph Convolutional Networks (FL-GCNs). We use FL-GCN to recognize spatial and temporal patterns simultaneously. The underlying road network topology is transformed into a corresponding line graph. This structure provides a general framework for predicting spatial-temporal O-D information from link traffic flows. Data from a New Jersey Turnpike network is used to evaluate the proposed model. The results show that FL-GCN can recognize spatial and temporal patterns. We also compare FL-GCN with Kalman filter; the results show that our model can outperform Kalman filter by 17.87% in predicting the whole O-D pairs.