Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Posture Manipulation During Tumbling for Closed-Loop Heading Angle Control
Paper and Code
May 08, 2024
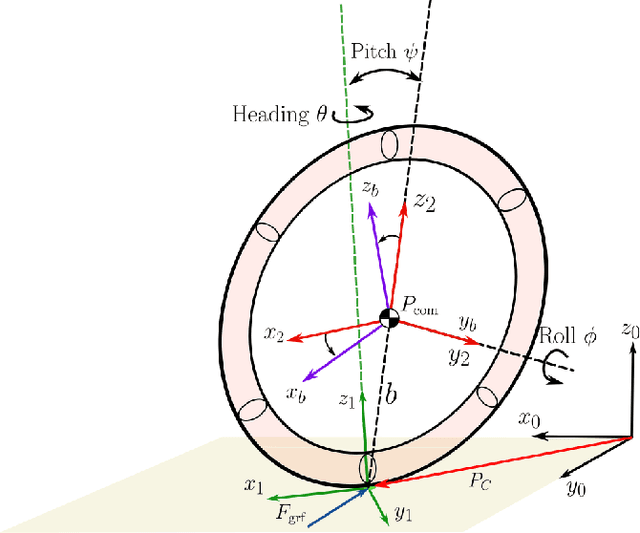
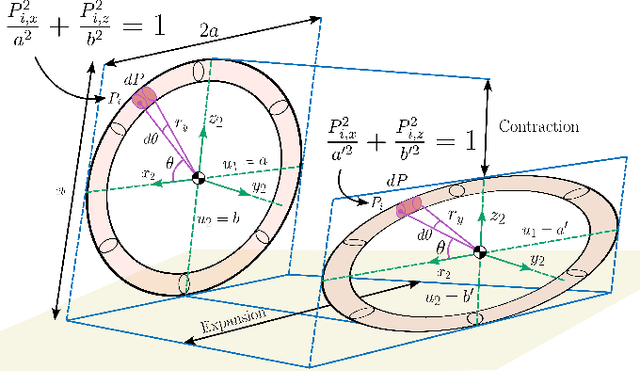

Passive tumbling uses natural forces like gravity for efficient travel. But without an active means of control, passive tumblers must rely entirely on external forces. Northeastern University's COBRA is a snake robot that can morph into a ring, which employs passive tumbling to traverse down slopes. However, due to its articulated joints, it is also capable of dynamically altering its posture to manipulate the dynamics of the tumbling locomotion for active steering. This paper presents a modelling and control strategy based on collocation optimization for real-time steering of COBRA's tumbling locomotion. We validate our approach using Matlab simulations.
View paper on