 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Fusion Network for RGBT Tracking
Paper and Code
Sep 16, 2021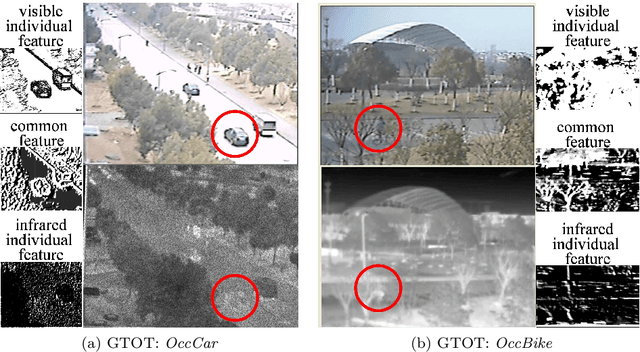
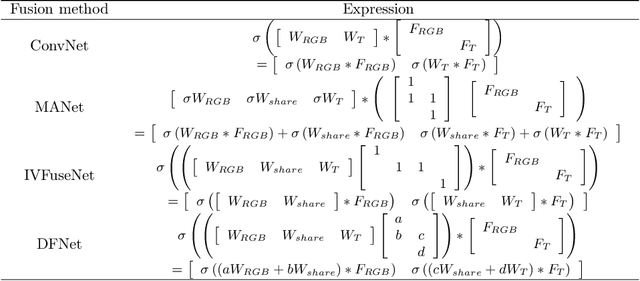


For both visible and infrared images have their own advantages and disadvantages, RGBT tracking has attracted more and more attention. The key points of RGBT tracking lie in feature extraction and feature fusion of visible and infrared images. Current RGBT tracking methods mostly pay attention to both individual features (features extracted from images of a single camera) and common features (features extracted and fused from an RGB camera and a thermal camera), while pay less attention to the different and dynamic contributions of individual features and common features for different sequences of registered image pairs. This paper proposes a novel RGBT tracking method, called Dynamic Fusion Network (DFNet), which adopts a two-stream structure, in which two non-shared convolution kernels are employed in each layer to extract individual features. Besides, DFNet has shared convolution kernels for each layer to extract common features. Non-shared convolution kernels and shared convolution kernels are adaptively weighted and summed according to different image pairs, so that DFNet can deal with different contributions for different sequences. DFNet has a fast speed, which is 28.658 FPS. The experimental results show that when DFNet only increases the Mult-Adds of 0.02% than the non-shared-convolution-kernel-based fusion method, Precision Rate (PR) and Success Rate (SR) reach 88.1% and 71.9% respectively.