 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic-Aware Autonomous Exploration in Populated Environments
Paper and Code
Apr 06, 2021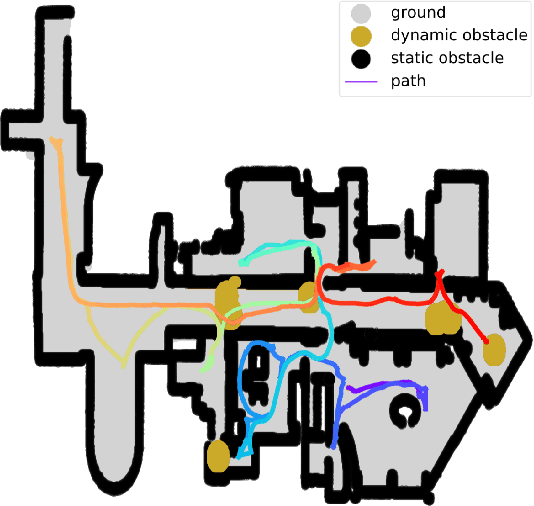

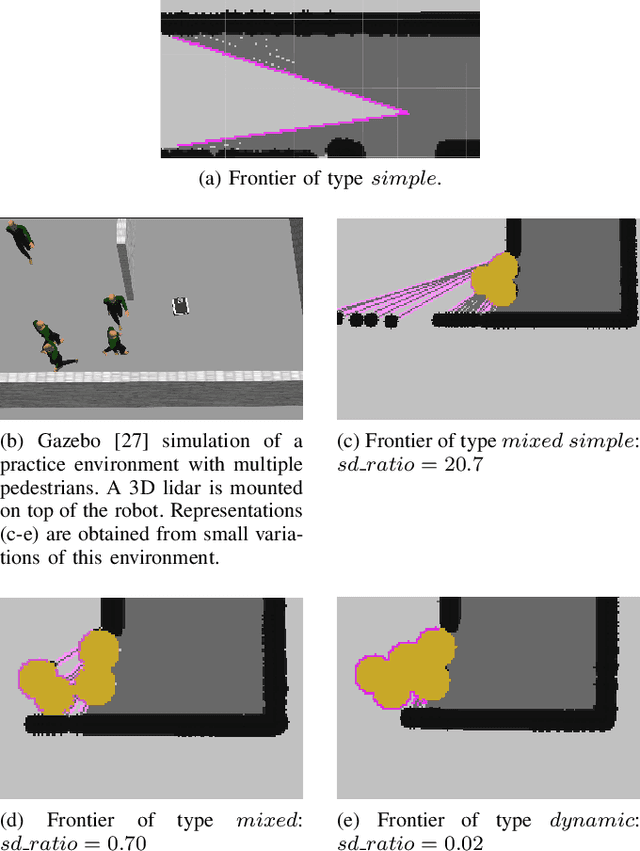
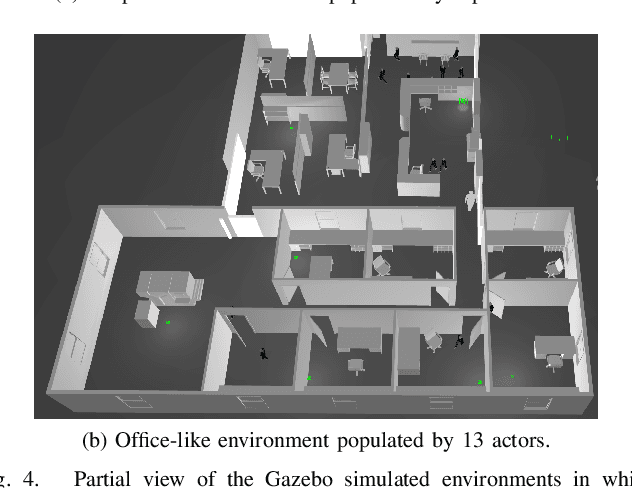
Autonomous exploration allows mobile robots to navigate in initially unknown territories in order to build complete representations of the environments. In many real-life applications, environments often contain dynamic obstacles which can compromise the exploration process by temporarily blocking passages, narrow paths, exits or entrances to other areas yet to be explored. In this work, we formulate a novel exploration strategy capable of explicitly handling dynamic obstacles, thus leading to complete and reliable exploration outcomes in populated environments. We introduce the concept of dynamic frontiers to represent unknown regions at the boundaries with dynamic obstacles together with a cost function which allows the robot to make informed decisions about when to revisit such frontiers. We evaluate the proposed strategy in challenging simulated environments and show that it outperforms a state-of-the-art baseline in these populated scenarios.